Avionics
- James Albright (a former G450 driver)
Updated: 2015-07-22
It is almost impossible to even scratch the surface of this topic, the avionics suite is just so vast and complex. Whenever a question comes up, however, I've attempted to do just that.
You will find a lot more on this topic spread throughout the website. One of these days I'll tidy all this up.
Everything here is from the references shown below, with a few comments in an alternate color.
Avionics Power Up
[G450 Aircraft Operating Manual, §07-01-20.5.C.(6)] Cockpit systems power up should be delayed until cockpit, cabin and Electronic Equipment Rack (EER) temperatures have reached approximately +65°F. These systems include DUs and IRSs. Extreme cold-soaking can cause spurious failure messages and indications on the CAS until core temperature of control units have reached normal operating temperatures. Once temperatures have reached approximately +65°F, reset the SFD circuit breaker (POP, E-9) and STBY EBDI circuit breaker (CPOP, D-9), if pulled during the preflight inspection.
The avionics boot up process takes about two minutes, the display controller will indicate “Power Up Test in Progress” until the boot up is complete. Experience shows that rushing through this wait process can lead to PlaneView boot up errors.
If it is too cold to bring up a DU, you should still perform an APU fire system check prior to APU start. Ensure the pressurization FAULT light does not illuminate as a test of the AC Essential REAC relay and once the DU is up ensure the FIRE BOTTLE DISCHARGE message is not present.
CDI Deviation

[G450 Aircraft Operating Manual, §2B-05-50 Table 21]
Circuit Breakers, Missing
If you can't find a circuit breaker it could be that it doesn't exist. Many systems exist within an MAU and the only breaker is for that entire MAU. For example, you won't find a GPS circuit breaker.
Comparison Monitor Annunciators
[G450 Aircraft Operating Manual, §2B-05-30 ¶2.B.] The amber comparison monitor annunciators are displayed when displayed pilot and copilot input data is compared by the system and the displayed data exceeds the predetermined limits. Active messages are cleared when the miscompare situation has been corrected. The comparisons are made when the pilot and copilot have the same type of data, but different sources, selected for display. If the pilot and copilot both have ILS1 selected (amber source annunciator), no comparison monitor is active on that data (LOC, GS). ILS comparison monitors are active when the radio altimeter reading is 1200 ft or less. The comparison monitors flash for the first five seconds they are displayed.
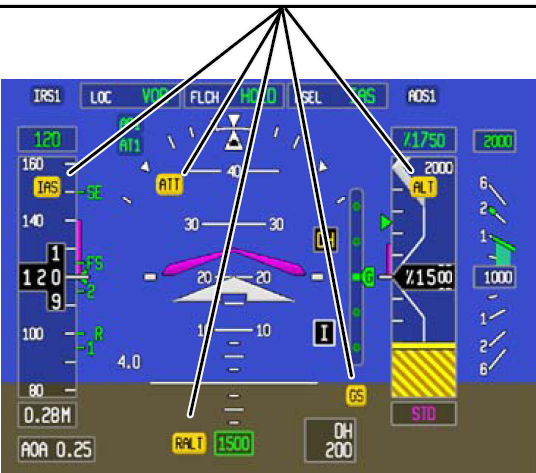
PIT (Pitch ±5°), ROL (Roll ±6°), ATT (both pitch and roll)
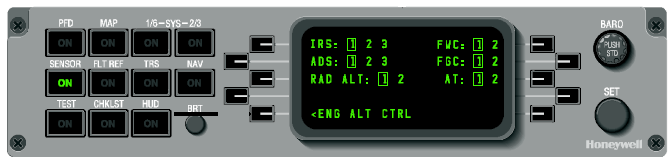
Check other pilot display and standby display — select good IRS on SENSOR page
HDG (Heading ±10°)
Check heading on standby flight display, the only source of non-IRS heading information — select good IRS on SENSOR page.
ALT (Altitude ±200 ft), IAS (Air Speed ±20 knots)
Check altitude and IAS on standby flight display — select good ADS on SENSOR page
LOC (Localizer ±38μA 1/2 dot), or AZ (Azimuth ±38μA 1/2 dot)
Check navigation on standby flight display
GS (Glideslope ±50μA 2/3 dot), or GP (Glide Path ±50μA 2/3 dot)
Check navigation on standby flight display
ILS (Both LOC and GS)
Check navigation on standby flight display
Data Link on VHF 1 or 2?
If you can't use VHF 3 for some reason, can you get data link off 1 or 2? Yes, just switch them to data. You can test this easily enough:
Display Units Layout
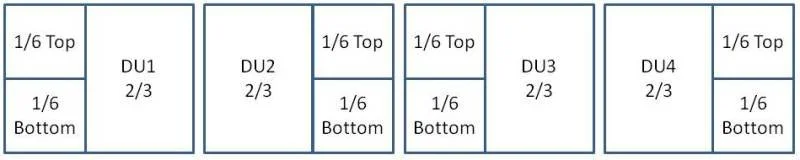
[G450 Aircraft Operating Manual, §2B-03-10] Preferred item in bold
DU 1
1/6 Top: AC/DC Summary, APU, Brakes, CAS, Checklist, Compacted Engines, Datalink, ECS, Engine Start, Flight Controls, Ground Service Panel, Primary Engine, Secondary Engine, TCAS, Video
1/6 Bottom: AC/DC Summary, APU, Brakes, CAS, Checklist, Compacted Engines, Datalink, ECS, Engine Start, Flight Controls, Ground Service Panel, Primary Engine, Secondary Engine, TCAS, Video
2/3: PFD
DU 2
1/6 Top: Primary Engine
1/6 Bottom: AC/DC Summary, APU, Brakes, CAS, Checklist, Compacted Engines, ECS, Engine Start, Flight Controls, Ground Service Panel, Secondary Engine, TCAS, Video, Waypoint List
2/3: I-NAV, Charts, Synoptics, Video
DU 3
1/6 Top: CAS
1/6 Bottom: AC/DC Summary, APU, Brakes, Checklist, Compacted Engines, ECS, Engine Start, Flight Controls, Ground Service Panel,Primary Engine, TCAS, Video, Waypoint List
2/3: I-NAV, Charts, Synoptics, Video
DU 4
1/6 Top: AC/DC Summary, APU, Brakes, CAS, Checklist, Compacted Engines, Datalink, ECS, Engine Start, Flight Controls, Ground Service Panel, Primary Engine, Secondary Engine, TCAS, Video
1/6 Bottom: AC/DC Summary, APU, Brakes, CAS, Checklist, Compacted Engines, Datalink, ECS, Engine Start, Flight Controls, Ground Service Panel, Primary Engine, Secondary Engine, TCAS, Video
2/3: PFD
Display Unit Power Sources
[G450 Quick Reference Handbook, pg. EA-18]
DU 1 - L ESS DC
DU 2 - L MAIN DC and L ESS DC
DU 3 - R MAIN DC and R ESS DC
DU 4 - R ESS DC
If you lose the two center tubes you may have a Dual Generator Failure since they require main DC power which are not automatically backed up together. The outer tubes are backed up all the way down to battery power.
EDS Intermittent Failure
[Gulfstream Journal, Planeview EDS Intermittent Failure, November 14, 2014]
A flight crew reported a momentary in-flight failure of multiple PlaneView modules with associated Crew Alerting System (CAS) messages. Because this was a momentary event, there was not enough time for the crew to take any corrective action before the condition cleared itself. However, the primary flight display (PFD) remained on display unit (DU) #2. This made it necessary to restore normal Electronic Display System (EDS) operation by depressing the Display Controller "2/3" selection switch capsule for three seconds. Over the course of the next four flights, the aircraft exhibited similar issues on two of the legs; again, none giving enough time to take any corrective action.
With no clear indication as to what could cause these random faults, the decision was made to swap NIC/Proc #3 and #6 and reload software in accordance with Aircraft Maintenance Manual (AMM) section 20-22-00. The technician then performed torque checks of all MAU cabinet modules and connectors in accordance with ATA 31 of the AMM. While performing the torque check, the maintenance technician found MAU #1 NIC/Proc #2 with both upper and lower module screws backed off. On each screw, it was necessary to provide one half-turn before reaching torque requirement. MAU #2 Control I/O #2, Custom I/O #2, and SGIO #4 modules were each found with one of the screws loose. MAU #3 Control I/O #3 was also found with loose upper and lower screws. The loose fasteners were torqued and the remaining connectors torque was verified. The aircraft was returned to service with no further PlaneView failures.
Emergency Locator Transmitter
You can fly an entire career and never have to know a thing about your ELT, in fact, that would be ideal. Unfortunately, you do take checkrides and you do meet a ramp inspector now and then, so pay attention.
Installation / Frequencies
[G450 AOM, ¶2A-23-70:] A battery powered Emergency Locator Transmitter (ELT) unit is installed in the upper shelf of the Electronic Equipment Rack in the baggage compartment. The unit is activated either in automatic mode by a G-force switch on the unit set at a velocity change of 4.5 fps or manually by a switch installed on the copilot instrument panel below the clock. Once activated, the ELT emits a loud aural siren-type sound that is audible outside the aircraft and transmits radio signals over a dedicated antenna on the upper fuselage just forward of the APU air intake scoop. The ELT uses three radio frequencies to facilitate locating the aircraft:
121.5 MHz - standard civil emergency frequency
243.0 MHz - military emergency frequency
406.028 MHz - emergency satellite locating frequency
A "velocity change of 4.5 fps" is meaningless without a time reference and comes to a change of less than 3 knots. If they had meant 4.5 ft/sec2 that would be 0.14 G's and that can't be right either. The G450 AMM doesn't include the ELT for some reason but has the Cockpit Voice Recorder G switch set at 2.5 G's which seems reasonable to me.
Transmission
The transmission over the emergency satellite frequency (406.028 MHz) consists of a digital data block that includes the aircraft identification (tail number or a coded 24 bit address), country of registration, Search and Rescue Satellite (sarsat) identification code, and position coordinates. (The aircraft specific digital data is strapped into the ELT unit upon initial installation.) Position data is continually furnished to the ELT over a ARINC-429 link with IRU #1. Upon receipt of the data block by the emergency satellite, information particular to the aircraft is activated in the emergency satellite network database. The satellite frequency data transmission occurs every 50 seconds for 520 milliseconds, with the transmissions continuing for the first 24 hours after the ELT is activated. After 24 hours, the satellite transmission ceases to preserve battery power for the other two frequency transmissions that will continue to broadcast a pulsing audio tone signal until the unit batteries are exhausted, normally at least 50 hours after activation.
Electrical Power
The ELT is normally powered by the emergency DC bus to provide continuous IRU position information to the unit, but the ELT has four internal “D” size lithium / manganese dioxide batteries enabling the ELT to transmit independent of aircraft power.) The system is designed to immediately provide the satellite network with the aircraft position in order to initiate a search and rescue effort and subsequently provide a homing signal over standard emergency frequencies for as long as battery power is available. Using location data from IRU #1, the aircraft / ELT position broadcast over the sarsat frequency is able to achieve an accuracy approximating 100 meters. The ELT is housed within a polycarbonate plastic casing that will withstand 500 g’s, a 1,000 lb crush weight, and a temperature range of -20°C to +55°C.
Test Procedure
Any ELT test should only be performed within the first 5 minutes of the hour.
Notify any control tower or ATC facility within reception range of the intention to test the ELT and the time of the test.
No test should exceed 5 seconds in duration.
Provide aircraft power to the ELT unit for a least 30 seconds prior to testing in order for the position reporting system to be validated.
Tune a communications receiver to 121.5 MHz to monitor the locator beacon.
Turn either the cockpit or baggage compartment switch ON, monitoring the emergency frequency for 3 audio tone pulses that should be completed within approximately 1 second and verifying illumination of the adjacent red indicator light, then select the switch back to the ARM or OFF position. If the ELT is operating normally, the red indicator light should remain illuminated for one second and then extinguish. This test procedure verifies the G-force switch, the satellite transmitter integrity and validity of the IRU position information. (Locator beacon radio transmission is verified by monitoring the 121.5 radio frequency.)
If a malfunction is revealed during the test, the indicator light(s) will flash a coded signal to identify the problem:
One flash indicates a G-force switch failure
Three flashes indicate a satellite frequency (408.028 MHz) transmitter problem
Five flashes indicate a lack of position information from the IRU
Seven flashes indicate an internal battery malfunction
Requirement
MEL

The MMEL lists none installed, none required. Most U.S. based MELs list one installed, none required with the caveat shown.
FAA
An ELT is required by 14 CFR 91.207.
ICAO Annex 6, Part 2
[§6.12.3] From 1 January 2005, all aeroplanes operated on extended flights over water as described in 6.3.3 b) and when operated on flights over designated land areas as described in 6.4 shall be equipped with one automatic ELT.
[§6.3.3 b)] When over water away from land suitable for making an emergency landing at a distance of more than 185 km (100 NM), in the case of a single-engine aeroplanes, and more than 370 km (200 NM), in the case of multi-engined aeroplanes capable of continuing flight with one engine inoperative.
[§6.4] Aeroplanes when operated aross land areas which have been designated by the State concerned as areas in which search and rescue would be especially difficult.
Enhanced Ground Proximity Warning System

Figure: G450 Typical EGPWM pop-up display, from G450 Aircraft Operating Manual, §2B-20-110, figure 32.
Before the "E" of EGPWS, pilots were programmed to ignore many GPWS warnings because the knew they were smarter than the electrons. The Enhanced GPWS changes all that. If the EGPWS says you are about to die, chances are if you don't do something quickly, you will. How do you react? Immediately.
General Description

Figure: G450 EGPWS Simplified Block Diagram, from G450 Aircraft Operating Manual, §2B-20-10, figure 1.
[Honeywell EGPWS Pilot Guide, §1]
The EGPWS is a Terrain Awareness and Alerting system providing terrain alerting and display functions with additional features.
The EGPWS uses aircraft inputs including geographic position, attitude, altitude, airspeed, and glideslope deviation. These are used with internal terrain, obstacles, and airport databases to predict a potential conflict between the aircraft flight path and terrain or an obstacle. A terrain or obstacle conflict results in the EGPWS providing a visual and audio caution or warning alert.
Additionally, the EGPWS provides alerts for excessive glideslope deviation, too low with flaps or gear not in landing configuration, and optionally provides bank angle and altitude callouts based on system program pin selection. Detection of severe windshear conditions is also provided for selected aircraft types when enabled.
The "E" part of EGPWS gives you a terrain database so the system is doing more than just checking the radio altimeter. Among the features in this example (Honeywell) system . . .
Terrain Alerting and Display (TAD) provides a graphic display of the surrounding terrain on the Weather Radar Indicator, EFIS, or a dedicated display. Based on the aircraft's position and the internal database, the terrain topography (within the display range selected) that is above or within 2000 feet below the aircraft altitude is presented on the system display. This feature is an option, enabled by program pins during installation.
"Peaks" is a TAD supplemental feature providing additional terrain display features for enhanced situational awareness, independent of the aircraft's altitude. This includes digital elevations for the highest and lowest displayed terrain, additional elevation (color) bands, and a unique representation of 0 MSL elevation (sea level and its corresponding shoreline). This feature is an option, enabled by program pins during installation.
"Obstacles" is a feature utilizing an obstacle database for obstacle conflict alerting and display. EGPWS caution and warning visual and audio alerts are provided when a conflict is detected. Additionally, when TAD is enabled, Obstacles are graphically displayed similar to terrain. This feature is an option, enabled by program pins during installation.
A process feature called Envelope Modulation utilizes the internal database to tailor EGPWS alerts at certain geographic locations to reduce nuisance alerts and provide added protection.
A Terrain Clearance Floor feature adds an additional element of protection by alerting the pilot of possible premature descent. This is intended for non-precision approaches and is based on the current aircraft position relative to the nearest runway. This feature is enabled with the TAD feature.
In -210-210 and later versions, a Runway Field Clearance Floor (RFCF) feature is included. This is similar to the TCF feature except that RFCF is based on the current aircraft position and height above the destination runway based on Geometric Altitude (see next page). This provides improved protection at locations where the destination runway is significantly higher than the surrounding terrain.
An Aural Declutter feature reduces the repetition of warning messages. This feature is optional, and may be disabled by system program pins during installation.
Geometric Altitude, based on GPS altitude, is a computed pseudo-barometric altitude designed to reduce or eliminate altitude errors resulting from temperature extremes, non- standard pressure altitude conditions, and altimeter miss-sets. This ensures an optimal EGPWS alerting and display capability.
Runway Alerting & Advisory System (RAAS). The EGPWS also provides position awareness advisories relative to runways during ground operations and approach to land. This new feature is known as "Runway Awareness and Advisory System" - RAAS (only available in -218-218 or later versions).
Terrain Database
[Honeywell EGPWS Pilot Guide, §1] The EGPWS internal database consists of four sub-sets:
A worldwide terrain database of varying degrees of resolution.
An obstacles database containing cataloged obstacles 100 feet or greater in height located within North America, portions of Europe and portions of the Caribbean (expanding as data is obtained).
A worldwide airport database containing information on runways 3500 feet or longer in length. For a specific list of the airports included, refer to Honeywell document 060- 4267-000 or access on the Internet at website www.egpws.com.
An Envelope Modulation database to support the Envelope Modulation feature discussed later.
Resolution Differences
[Honeywell EGPWS Pilot Guide, §2] Because the overwhelming majority of "Controlled Flight Into Terrain" (CFIT) accidents occur near an airport, and the fact that aircraft operate in close proximity to terrain near an airport, and to address prevention of airport runway/taxiway incursions, the terrain database contains higher resolution grids for airport areas. Lower resolution grids are used out- side airport areas where aircraft enroute altitude make CFIT accidents less likely and terrain feature detail is less important to the flight crew.
G450 Specifics
[G450 Aircraft Operating Manual, §2B-20-10, pg. 2] The EGPWS contains a worldwide terrain database. The resolution of the database varies not only with location around the world but also relative to the proximity to airports. The database also contains the locations of all runways longer than 3200 feet that have a published instrument approach. The system uses this database, and position data to supply enhanced terrain awareness computations which, in turn, supply enhanced terrain awareness information to the pilots.
The terrain database is labeled the "threat database" in the red disk update series. (See G450 Aircraft Operating Manual, §2B-20-50, ¶1.)
WGS-84
[Honeywell DirectTo Newsletter, December 2011, page 11] Unlike the FMS, the EGPWS system will continue to use GPS information even if DME/DME is being used for navigation. The EGPWS database uses a combination of WGS-84 terrain data and non WGS-84 data obtained from the AIP which is checked against GPS position information and then converted if necessary. Therefore, aural cautions and warnings associated with EGPWS will be annunciated accurately. Honeywell Synthetic Vision Systems (SVS) however, will automatically be inhibited whenever GPS is deselected as the primary source of navigation in the FMS.
More about this: World Geodetic System 84 (WGS-84).
Geometric Altitude
[Honeywell EGPWS Pilot Guide, §2, page 36]
Based on GPS altitude, geometric altitude is a computed pseudo-barometric altitude (Above Sea Level - ASL) designed to reduce or eliminate errors potentially induced in Corrected Barometric Altitude by temperature extremes, non-standard pressure altitude conditions, and altimeter miss-sets. This ensures an optimal EGPWS Terrain Alerting and Display capability. Geometric Altitude also allows EGPWS operations in QFE environments without custom inputs or special operational procedures.
Geometric Altitude requires GPS Altitude input with its associated Vertical Figure Of Merit (VFOM) and Receiver Autonomous Integrity Monitoring (RAIM) failure indication, standard (uncorrected) altitude, Radio Altitude, Ground Speed, Roll Angle, and aircraft position (Latitude and Longitude). Additionally, corrected Barometric Altitude, Static Air Temperature (SAT), GPS mode, and the number of satellites tracked are used if available.
The Geometric Altitude is computed by blending a calculated Non-Standard Altitude, Runway Calibrated Altitude (determined during takeoff), GPS Calibrated Altitude, Radio Altitude Calibrated Altitude (determined during approach), and Altitude Barometric Altitude (if available). Estimates of the VFOM for continued each of these are determined and applied in order to determine its weight in the final altitude. The blending algorithm gives the most weight to altitudes with a higher estimated accuracy, reducing the effect of less accurate altitudes. Each component altitude is also checked for reasonableness using a window monitor computed from GPS Altitude and its VFOM. Altitudes that are invalid, not available, or fall outside the reasonableness window are not included in the final Geometric Altitude value.
The Geometric Altitude algorithm is designed to allow continued operation when one or more of the altitude components are not available. If all component altitudes are invalid or unreasonable, the GPS Altitude is used directly. If GPS Altitude fails or is not present, then the EGPWS reverts to using Corrected Barometric Altitude alone.
The Geometric Altitude function is fully automatic and requires no pilot action.
G450 Specifics
[G450 Aircraft Operating Manual, §2B-20-40, ¶1.] Geometric altitude is a computed aircraft altitude designed to help ensure optimal operation of the EGPWM terrain awareness and display functions through all phases of flight and atmospheric conditions. Geometric altitude uses an improved pressure altitude calculation, GPS altitude, radio altitude, and terrain and runway elevation data to reduce or eliminate errors potentially induced in corrected barometric altitude by temperature extremes, non-standard altitude conditions, and altimeter miss-sets. Geometric altitude also permits continuous EGPWM operations in QFE environments without custom inputs or special operational procedures.
TCAS Interface
[Honeywell EGPWS Pilot Guide, §2, page 36] Audio outputs are provided as specific alert phrases, and altitude callouts or tones provided by an EGPWS speaker and via the cockpit Interphone system for headset usage. Several audio output levels are available. They are established during the installation of the EGPWS. These EGPWS audio outputs can be inhibited by other systems having higher priority (i.e., windshear) or cockpit switches in some cases. The EGPWS also has the ability to inhibit other system audio outputs such as TCAS.
G450 Specifics
[G450 Aircraft Operating Manual, §2A-34-50 ¶2.B.] When any EGPWS alerts are in progress, all TCAS messages are inhibited.
Terrain Clearance Floor
Figure: Terrain clearance floor alert envelope, from Honeywell EGPWS Pilot Guide, §2, page 25.
[Honeywell EGPWS Pilot Guide, §2, page 25] The Terrain Clearance Floor (TCF) function (enabled with TAD) enhances the basic GPWS Modes by alerting the pilot of descent below a defined "Terrain Clearance Floor" regardless of the aircraft configuration. The TCF alert is a function of the aircraft's Radio Altitude and distance (calculated from latitude/longitude position) relative to the center of the nearest runway in the database (all runways greater than 3500 feet in length). The TCF envelope is defined for all runways as illustrated below and extends to infinity, or until it meets the envelope of another runway. The envelope bias factor is typically 1/2 to 2 nm and varies as a function of position accuracy.

Figure: Improved terrain clearance floor alert envelope plan view, from Honeywell EGPWS Pilot Guide, §2, page 26.
[Honeywell EGPWS Pilot Guide, §2, page 26] In -210-210 and later versions, the TCF alert envelope and Envelope Bias Factor are improved. The alert envelope is limited to a minimum of 245 feet AGL adjacent to the runway as illustrated in the following diagrams. The Envelope Bias Factor is reduced (moved closer to the runway) when higher accuracy aircraft position and runway position information is available. This is typically 1/3 to 1 nm providing greater protection against landing short events. With version -218-218 and later models, the envelope bias factor is reduced to 1/4 nm if runway and position data is of high integrity.
G450 Specifics
[G450 Aircraft Operating Manual, § 2A-34-50 ¶2.A.] The TCF alert function adds an additional element of protection to the standard GPWS by alerting the flight crew of possible premature descent during non-precision approaches regardless of airplane configuration. It creates a terrain clearance envelope around the airport to provide protection against CFIT situations beyond that of basic GPWS. TCF alerts are based on current airplane location, nearest runway center point position and radio altitude. TCF is active during takeoff, cruise and final approach. When landing at an airport with no approved approach procedure, or where the longest runway is less than 3500 ft in length, or the airport is not included in the Jeppesen database, EGPWS may generate a Terrain Alert and the Terrain Awareness Display (TAD). At these airports the TERRAIN INHIBIT switch, located on the Standby Rudder/Yaw Damper panel, can be selected ON at the discretion of the flight crew to avoid nuisance alerts.
The EGPWS database is updated periodically on the red update disk. While you may not find yourself landing on a runway less than 3,500' the terrain or even the runway may have changed. (That happened to us landing in LGAV. The Athens airport moved several miles when they closed the older and opened the newer between two hills. The database was not aware the Greeks had bulldozed the hills.)
Runway Clearance Floor
Figure: Runway clearance floor alert envelope, from Honeywell EGPWS Pilot Guide, §2, page 27.
[Honeywell EGPWS Pilot Guide, §2, page 27]
In -210-210 and later versions, a Runway Field Clearance Floor feature is included. This is similar to the TCF feature except that RFCF is based on the current aircraft position and height above the destination runway, using Geometric Altitude (in lieu of Radio Altitude). This provides improved protection at locations where the runway is significantly higher than the surrounding terrain [as illustrated]. With version -218-218 and later models, the RFCF envelope is moved from 1nm to 1/2nm if runway and position data is of high integrity.
TCF and RFCF alerts result in illumination of the EGPWS caution lights and the aural message "TOO LOW TERRAIN". The audio message is provided once when initial envelope penetration occurs and again only for additional 20% decreases in Radio Altitude. The EGPWS caution lights will remain on until the TCF envelope is exited.
Terrain Alerting

Figure: Terrain look ahead alerting, from Honeywell EGPWS Pilot Guide, §2, page 28.
[Honeywell EGPWS Pilot Guide, §2, page 28]
Another enhancement provided by the internal terrain database, is the ability to look ahead of the aircraft and detect terrain or obstacle conflicts with greater alerting time.
This is accomplished (when enabled) based on aircraft position, flight path angle, track, and speed relative to the terrain database image forward the aircraft.
Through sophisticated look ahead algorithms, both caution and continued warning alerts are generated if terrain or an obstacle conflict with "ribbons" projected forward of the aircraft (see following illustration). These ribbons project down, forward, then up from the aircraft with a width starting at 1/4 nm and extending out at ±3° laterally, more if turning. The look-down and up angles are a function of the aircraft flight path angle, and the look-down distance a function of the aircraft's altitude with respect to the nearest or destination runway. This relationship prevents undesired alerts when taking off or landing. The look-ahead distance is a function of the aircraft's speed, and distance to the nearest runway.
[Honeywell EGPWS Pilot Guide, §2, page 29]
When a compatible Weather Radar, EFIS, or other display is available and enabled, the EGPWS Terrain Alerting and Display (TAD) feature provides an image of the surrounding terrain represented in various colors and intensities.
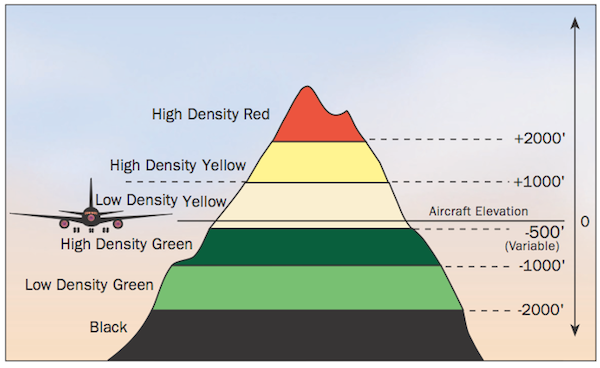
There are two types of TAD displays depending on the options selected. The original type provides a terrain image only when the aircraft is 2000 feet or less above the terrain. A second type called "Peaks" enhances the display characteristics to provide a higher degree of terrain awareness independent of the aircraft's altitude (available for selected display types in version -206-206 with additional displays added in later versions). In either case, terrain and obstacles (if enabled) forward of the aircraft are displayed. Obstacles are presented on the cockpit display as terrain, employing the same display-coloring scheme. TAD, Peaks and Obstacle functions are enabled by EGPWS program pin selection.
Each specific color and intensity represents terrain (and obstacles) below, at, or above the aircraft's altitude based on the aircraft's position with respect to the terrain in the database. If no terrain data is available in the terrain database, then this area is displayed in a low-density magenta color. Terrain more than 2000 feet below the aircraft, or within 400 (vertical) feet of the nearest runway elevation, is not displayed (black). With version -218-218 or later, the transition to black may occur below 400 feet based on runway and terrain database integrity for a given area.
The transition between green and yellow is below the aircraft in order to account for altimetry and/or terrain/obstacle height errors. Also, the transition altitudes between colors are biased upward proportional to the descent rate when greater than 1000 feet per minute. This provides approximately a 30 second advance display of terrain.
Essentially, pilots should note that any yellow or red painted terrain is at, or above the aircraft's altitude and appropriate terrain clearance needs to be provided.
G450 Specifics
Figure: G450 Terrain clearance floor, from G450 Aircraft Operating Manual, §2B-20-110, figure 30.
[G450 Aircraft Operating Manual, § 2A-34-50 ¶2.B.] Terrain alerting predicts potential conflicts between the airplane flight path and the surrounding terrain and provides the flight crew with visual and aural alerts. To compute terrain awareness, the EGPWS software uses airplane geographic position, airplane altitude, and a terrain database to determine the relative position of the airplane in relation to the surrounding terrain, generating a clearance envelope as far as one minute ahead of the airplane. At the onset of a terrain caution, (approximately 60 seconds prior to potential terrain conflict), the terrain alerting function causes an amber TERRAIN icon to be displayed on the PFD and annunciates an aural“ TERRAIN, TERRAIN” callout. This is repeated every seven seconds as long as the airplane is within the caution envelope. At the onset of a terrain warning, (approximately 30 seconds prior to potential terrain conflict), the terrain alerting function causes red TERRAIN and PULL UP icons to be displayed on the PFD, a TAD on the HSI and annunciates aural “TERRAIN, TERRAIN” and “PULL UP, PULL UP” Callouts. The aural callout is repeated continuously while the airplane is within the warning envelope.
EGPWS Modes
Mode 1 - Excessive Descent Rate

Figure: EGPWS Mode 1, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.A.]
[Honeywell EGPWS Pilot Guide, §2, page 8]
Mode 1 provides alerts for excessive descent rates with respect to altitude AGL and is active for all phases of flight. This mode has inner and outer alert boundaries as illustrated in [the diagram].
Penetration of the outer boundary activates the EGPWS caution lights and "SINKRATE, SINKRATE" alert enunciation. Additional "SINKRATE, SINKRATE " messages will occur for each 20% degradation in altitude.
Penetration of the inner boundary activates the EGPWS warning lights and changes the audio message to "PULL UP" which repeats continuously until the inner warning boundary is exited.
Note: "Pull Up" may be preceded by "Whoop, Whoop" in some configurations based on the audio menu option selected.
If a valid ILS Glideslope front course is received and the aircraft is above the glideslope centerline, the outer (sink rate) boundary is adjusted to desensitize the sink rate alerting. This is to prevent unwanted alerts when the aircraft is safely capturing the glideslope (or repositioning to the centerline) from above the beam.
If the Aural Declutter feature is disabled, the sink rate alert boundary remains fixed and the aural message "SINKRATE" repeats continuously until the outer boundary is exited.
The EGPWS offers a Steep Approach option for given aircraft types (typically bizjets) that desensitizes the alert boundaries to permit steeper than normal approaches without unwanted alerts.
EGPWS Mode 2A - Excessive Closure to Terrain

Figure: EGPWS Mode 2A, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.B.]
[Honeywell EGPWS Pilot Guide, §2, page 9]
Mode 2 provides alerts to help protect the aircraft from impacting the ground when rapidly rising terrain with respect to the aircraft is detected. Mode 2 is based on Radio Altitude and on how rapidly Radio Altitude is decreasing (closure rate). Mode 2 exists in two forms, 2A and 2B.
Mode 2A is active during climbout, cruise, and initial approach (flaps not in the landing configuration and the aircraft not on glideslope centerline). If the aircraft penetrates the Mode 2A caution envelope, the aural message "TERRAIN, TERRAIN" is generated and cockpit EGPWS caution lights will illuminate. If the aircraft continues to penetrate the envelope, the EGPWS warning lights will illuminate and the aural warning message "PULL UP" is repeated continuously until the warning envelope is exited.
Note: "Pull Up" may be preceded by "Whoop, Whoop" in some configurations based on the audio menu option selected.
Upon exiting the warning envelope, if terrain clearance continues to decrease, the aural message "TERRAIN" will be given until the terrain clearance stops decreasing. In addition, the visual alert will remain on until the aircraft has gained 300 feet of barometric altitude, 45 seconds has elapsed, or landing flaps or the flap override switch is activated.
With version -210-210 and later models, the Mode 2A upper limit is reduced to 1250 feet (950 feet with version -218- 218 and later) for all airspeeds when the Terrain Alerting and Display (TAD) function is enabled and available. This is due to the enhanced alerting capability provided with TAD, resulting from high integrity GPS Altitude and Geometric Altitude data. The Mode 2A envelope is lowered in order to reduce the potential for nuisance alerts during an approach.
EGPWS Mode 2B - Excessive Closure to Terrain

Figure: EGPWS Mode 2B, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.B.]
[Honeywell EGPWS Pilot Guide, §2, page 11]
Mode 2B provides a desensitized alerting envelope to permit normal landing approach maneuvers close to terrain without unwanted alerts. Mode 2B is automatically selected with flaps in the landing configuration (landing flaps or flap over-ride selected) or when making an ILS approach with Glideslope and Localizer deviation less than 2 dots. It is also active during the first 60 seconds after takeoff.
With version -210-210 and later models, Mode 2B is selected when the aircraft is within 5nm (10nm with version -218- 218 and later) and 3500 feet of the destination airport (independent of configuration) and the Terrain Alerting and Display (TAD) function is enabled and available. This is due to the enhanced alerting capability provided with TAD, resulting from high integrity GPS Altitude and Geometric Altitude data. The Mode 2B envelope is selected in order to reduce the potential for nuisance alerts during an approach.
During an approach, if the aircraft penetrates the Mode 2B envelope with either the gear or flaps not in the landing configuration, the aural message "TERRAIN, TERRAIN" is generated and the EGPWS caution lights illuminate. If the aircraft continues to penetrate the envelope, the EGPWS warning lights illuminate and the aural message "PULL UP" is repeated continuously until the warning envelope is exited. If the aircraft penetrates the Mode 2B envelope with both gear and flaps in the landing configuration, the aural "PULL UP" messages are suppressed and the aural message "TERRAIN" is repeated until the envelope is exited.
EGPWS Mode 3 - Altitude Loss After Takeoff

Figure: EGPWS Mode 3, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.C.]
[Honeywell EGPWS Pilot Guide, §2, page 12]
Mode 3 provides alerts for significant altitude loss after takeoff or low altitude go-around (less than 245 feet AGL or 150 feet, depending on aircraft type) with gear or flaps not in the landing configuration. The amount of altitude loss that is permitted before an alert is given is a function of the height of the aircraft above the terrain as shown below. This protection is available until the EGPWS determines that the aircraft has gained sufficient altitude that it is no longer in the takeoff phase of flight. Significant altitude loss after takeoff or during a low altitude go-around activates the EGPWS caution lights and the aural message "DON'T SINK, DON'T SINK". The aural message is enunciated twice for each 20% degradation in altitude. Upon establishing a positive rate of climb, the EGPWS caution lights extinguish and the aural alert will cease.
If the Aural Declutter feature is disabled, the warning is enunciated continuously until positive climb is established.
EGPWS Mode 4A - Unsafe Terrain Clearance

Figure: EGPWS Mode 4A, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.D.]
[Honeywell EGPWS Pilot Guide, §2, page 13]
Mode 4 provides alerts for insufficient terrain clearance with respect to phase of flight, configuration, and speed. Mode 4 exists in three forms, 4A, 4B, and 4C.
Mode 4A is active during cruise and approach with the gear and flaps not in the landing configuration.
Mode 4B is active during cruise and approach with the gear in the landing configuration and flaps not in the landing configuration.
Mode 4C is active during the takeoff phase of flight with either the gear or flaps not in the landing configuration.
Mode 4 alerts activate the EGPWS caution lights and aural messages.
To reduce nuisance alerts caused by over-flying another aircraft, the upper limit of the Mode 4A/B alerting curve can be reduced (from 1000) to 800 feet. This occurs if the airplane is above 250 knots with gear and flaps not in landing configuration and a sudden change in Radio Altitude is detected. This is intended to eliminate nuisance alerts while flying a holding pattern and an aircraft over-flight occurs (with 1000 foot separation).
With version -210-210 and later models, Mode 4 airspeed expansion is disabled (upper limit held at lowest airspeed limit) when the Terrain Alerting and Display (TAD) function is enabled and available. This is due to the enhanced alerting capability provided with TAD, resulting from high integrity GPS Altitude and Geometric Altitude data. This change to the Mode 4 envelopes reduces the potential for nuisance alerts when the aircraft is not in the landing configuration.
Mode 4A is active during cruise and approach with gear and flaps up. This provides alerting during cruise for inadvertent flight into terrain where terrain is not rising significantly, or the aircraft is not descending excessively. It also provides alerting for protection against an unintentional gear-up landing.
Below 1000 feet AGL and above 190 knots airspeed, the Mode 4A aural alert is "TOO LOW TERRAIN". This alert is dependent on aircraft speed such that the alert threshold is ramped between 500 feet at 190 knots to 1000 feet at 250 knots.
Below 500 feet AGL and less than 190 knots airspeed, the Mode 4A aural alert is "TOO LOW GEAR".
For either Mode 4A alert, subsequent alert messages occur for each 20% degradation in altitude. EGPWS caution lights extinguish and aural messages cease when the Mode 4A alert envelope is exited.
If the Aural Declutter feature is disabled, mode 4A alert messages are repeated continuously until the Mode 4A envelope is exited.
EGPWS Mode 4B - Unsafe Terrain Clearance
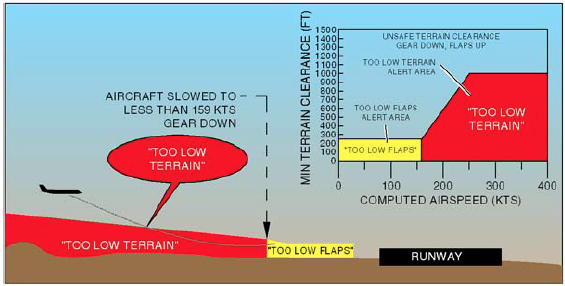
Figure: EGPWS Mode 4B, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.D.]
[Honeywell EGPWS Pilot Guide, §2, page 14]
Mode 4B is active during cruise and approach, with gear down and flaps not in the landing configuration.
Below 1000 feet AGL and above 159 knots airspeed, the Mode 4B aural alert is "TOO LOW TERRAIN". This alert is dependent on aircraft speed such that the alert threshold is ramped between 245 feet at 159 knots to 1000 feet at 250 knots.
Below 245 feet AGL and less than 159 knots airspeed, the Mode 4B aural alert is "TOO LOW FLAPS". For turboprop and select turbofan aircraft, the "TOO LOW FLAPS" warning curve is lowered to 150 feet AGL and less than 148 knots.
If desired, the pilot may disable the "TOO LOW FLAPS" alert by engaging the Flap Override switch (if installed). This precludes or silences the Mode 4B flap alert until reset by the pilot.
If the aircraft's Radio Altitude decreases to the value of the MTC, the EGPWS caution illuminates and the aural message "TOO LOW TERRAIN" is enunciated.
For either Mode 4B alert, subsequent alert messages occur for each 20% degradation in altitude. EGPWS caution lights extinguish and aural messages cease when the Mode 4B alert envelope is exited.
If the Aural Declutter feature is disabled, mode 4B alert messages are repeated continuously until the Mode 4B envelope is exited.
EGPWS Mode 4C - Unsafe Terrain Clearance

Figure: EGPWS Mode 4C, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.D.]
[Honeywell EGPWS Pilot Guide, §2, page 15]
The Mode 4C alert is intended to prevent inadvertent controlled flight into the ground during takeoff climb into terrain that produces insufficient closure rate for a Mode 2 alert. After takeoff, Mode 4A and 4B provide this protection.
Mode 4C is based on an EGPWS computed Minimum Terrain Clearance (MTC) floor, that increases with Radio Altitude. It is active after takeoff when the gear or flaps are not in the landing configuration. It is also active during a low altitude go-around if the aircraft has descended below 245 feet AGL (or 150 feet depending on aircraft type).
At takeoff the Minimum Terrain Clearance (MTC) is zero feet. As the aircraft ascends the MTC is increased to 75% of the aircraft's Radio Altitude (averaged over the previous 15 seconds). This value is not allowed to decrease and is limited to 500 feet AGL for airspeed less than 190 knots. Beginning at 190 knots, the MTC increases linearly to the limit of 1000 feet at 250 knots.
If the aircraft's Radio Altitude decreases to the value of the MTC, the EGPWS caution illuminates and the aural message "TOO LOW TERRAIN" is enunciated.
EGPWS caution lights extinguish and aural messages cease when the Mode 4C alert envelope is exited.
If the Aural Declutter feature is disabled, mode 4C alert messages are repeated continuously until the Mode 4C envelope is exited.
EGPWS Mode 5 - Excessive Glide Slope Deviation

Figure: EGPWS Mode 5, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.E.]
[Honeywell EGPWS Pilot Guide, §2, page 17]
Mode 5 provides two levels of alerting for when the aircraft descends below glideslope, resulting in activation of EGPWS caution lights and aural messages.
The first level alert occurs when below 1000 feet Radio Altitude and the aircraft is 1.3 dots or greater below the beam. This turns on the caution lights and is called a "soft" alert because the audio message "GLIDESLOPE" is enunciated at half volume. 20% increases in the below glideslope deviation cause additional "GLIDESLOPE" messages enunciated at a progressively faster rate.
The second level alert occurs when below 300 feet Radio Altitude with 2 dots or greater glideslope deviation. This is called a "hard" alert because a louder "GLIDESLOPE, GLIDESLOPE" message is enunciated every 3 seconds continuing until the "hard" envelope is exited. The caution lights remain on until a glideslope deviation less than 1.3 dots is achieved.
To avoid unwanted Below Glideslope alerts when capturing the localizer between 500 and 1000 feet AGL, alerting is varied in the following ways:
Below Glideslope alerts are enabled only if the localizer is within 2 dots, landing gear and flaps are selected, Glideslope Cancel is not active, and a front course approach is determined.
The upper altitude limit for the alert is modulated with vertical speed. For descent rates above 500 FPM, the upper limit is set to the normal 1000 feet AGL. For descent rates lower than 500 FPM, the upper limit is desensitized (reduced) to a minimum of 500 feet AGL.
Additionally, both alert levels are desensitized below 150 feet AGL, to allow for normal beam variations nearer the ground, and reduce the possibility of nuisance alerts.
If the Aural Declutter feature is disabled, messages are repeated continuously until the Mode 5 envelope is exited.
Mode 5 alerts can be canceled by pressing the Glideslope Cancel switch (if installed). The EGPWS will interpret this switch one of two ways depending on the installation configuration.
A standard glideslope cancel switch allows for manually canceling Mode 5 alerting any time below 2000 feet AGL. This is automatically reset when the aircraft descends below 30 feet or climbs above 2000 feet AGL (1000 feet AGL for current Boeing production aircraft).
An alternate glideslope cancel switch allows for manually canceling Mode 5 alerting at any time and any altitude. The cancel is reset by again pressing the cancel switch, or automatically if gear or flaps are raised, or the aircraft is on the ground. Due to the nature of the alternate cancel switch, this method requires that there be a cockpit annunciation that glideslope cancel is in effect (this con- figuration is currently not allowed on aircraft operating under FAA part 121 rules).
EGPWS Mode 5 alerts are inhibited during back course approaches to prevent nuisance alerts due to false fly up lobes from the Glideslope. The EGPWS determines a back course approach if either: 1) the aircraft's magnetic track is greater than 90 degrees from the runways approach course, or 2) a glideslope inhibit discrete is set.
EGPWS Mode 6 - Advisory Callouts

Figure: EGPWS Mode 6, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.F.]
[Honeywell EGPWS Pilot Guide, §2, page 19]
Mode 6 provides EGPWS advisory callouts based on the menu-selected option established at installation (set by program pin configuration). These callouts consist of predefined Radio Altitude based voice callouts or tones and an excessive bank angle warning. There is no visual alerting provided with these callouts.
The following is a list of each of the possible altitude callouts or tones:

In some cases a callout is stated twice (e.g., "MINIMUMS, MINIMUMS") but in all cases a given callout is only enunciated once per approach.
Decision Height (DH) based callouts (Approaching Minimums, Minimums, etc.) require the landing gear to be down and occur when descending through the Radio Altitude corresponding to the selected DH. These also have priority over other altitude callouts when overlapping. For example, if DH is set to 200 and both "TWO HUNDRED" and "MINIMUMS" are valid callouts, then only "MINIMUMS" will be called out at 200 feet AGL.
DH plus based callouts (e.g., Approaching Minimums) are only applicable for aircraft providing a Decision Height altitude to the EGPWS. Consequently, not all EGPWS installations can utilize these callout options.
Due to the variety of altitude callout choices available, it is not possible to identify every combination in this guide. Refer to an appropriate Airplane Flight Manual or EGPWS Airplane Flight Manual Supplement for callout identification in a specific application or contact Honeywell.
Another feature available in the Altitude Callouts (options) is a "Smart 500" foot callout. When selected, this callout assists pilots during a non-precision approach by enunciating "FIVE HUNDRED" feet in addition to any other altitude callout discussed above. The EGPWS determines a non-precision approach when Glideslope is greater than 2 dots deviation (valid or not) or a back-course approach is detected. This feature has the distinction of adding the 500-foot callout during non-precision approaches and removing the 500-foot callout on precision approaches when part of the callout option.
The callout "BANK ANGLE, BANK ANGLE" advises of an excessive roll angle. The EGPWS provides several excessive bank angle envelopes supporting Air Transport, Business, or Military aircraft types (only Air Transport and Business are addressed below).
EGPWS Mode 7 - Severe Windshear

Figure: EGPWS Mode 7, from G450 Aircraft Operating Manual, § 2A-34-50 ¶3.G.]
[Honeywell EGPWS Pilot Guide, §2, page 23]
Mode 7 is designed to provide alerts if the aircraft encounters windshear. Two alerting envelopes provide either a Windshear Caution alert or a Windshear Warning alert each with distinctive aural and visual indications to the flight crew.
EGPWS windshear is provided for certain (not all) aircraft types and is a function of certain additionally required input signals and enabled internal detection algorithms. These are established during the initial installation and addressed in the appropriate Airplane Flight Manual (AFM) or EGPWS Airplane Flight Manual Supplement (AFMS).
Windshear Caution alerts are given if an increasing headwind Caution (or decreasing tailwind) and/or a severe updraft exceed a defined threshold. These are characteristic of conditions preceding an encounter with a microburst.
A Windshear Caution (if enabled) results in illumination of amber Windshear Caution lights and may (if separately enabled) also be accompanied by the aural message "CAUTION, WINDSHEAR". The lights remain on for as long as the aircraft is exposed to conditions in excess of the caution alert threshold. The Windshear Caution envelope is illustrated in the figure below.
Windshear Warning alerts are given if a decreasing headwind (or increasing tailwind) and/or a severe downdraft exceed a defined threshold. These are characteristic of conditions within or exiting an encounter with a microburst.
Windshear Warning results in illumination of red Windshear Warning lights and an aural siren followed by the message "WINDSHEAR, WINDSHEAR, WINDSHEAR". The lights remain on for as long as the aircraft is exposed to conditions in excess of the warning alert threshold. The aural message will not repeat unless another separate windshear event is encountered. The threshold is adjusted as a function of available climb performance, flight path angle, airspeeds significantly different from normal approach speeds, and unusual fluctuations in Static Air Temperature (typically associated with the leading edge of a microburst). The Windshear Warning envelope is illustrated in the figure shown on page 23.
Mode 7 Windshear alerting is active under the following conditions:
During takeoff; from rotation until an altitude of 1500 feet AGL is reached,
During approach; From an altitude of 1500 feet down to 10 feet AGL,
During a missed approach; until an altitude of 1500 feet AGL is reached.
Test Procedure
There is a lot of misinformation out there about the Honeywell EGPWS and no wonder, they do a lousy job of documenting their products. The newest available manual was written in 2003, though there is another that simply has a stamp "2011" with little or no updated content. The Honeywell EGPWS and RAAS Pilot Guide says there are 6 levels of test but only gives details for Level 1 and says "contact Honeywell" for the rest. Lots of luck doing that!
Looking at the G450 AOM you get a description of a Level 1 test, but nothing else. The way it is written leads you to believe that is the only level of test in this system.
[G450 AOM, §2B-20-140; ¶3]
In addition to power-up and continuous BIT, user activated tests, by discrete test switches, and/or maintenance system commands are supported.
The EGPWS provides a self-test capability for verifying and indicating intended functions. The self-test capability consists of one level to aid in testing and troubleshooting the EGPWS. This level is:
Level 1 - Go/No Go Test provides an overview of the current operational functions and an indication of their status.
For this sequence, when the test switch is activated, the cockpit visuals are activated and voices are issued to indicate what functions are correctly operating. For example, if no faults exist on an installation that uses the terrain awareness function in addition to basic GPWS and windshear, then the result of the self-test would typically be:
“Glideslope--Pull Up--Windshear Windshear Windshear--Terrain Terrain, Pull Up”
However, if no valid glideslope input was present then the sequence would be:
“Glideslope INOP--Pull Up--Windshear Windshear Windshear--Terrain Terrain, Pull Up”
The following phrases are used to report system status during the system self-test:
GPWS INOP
GLIDESLOPE INOP
WINDSHEAR INOP
TERRAIN INOP
BANK ANGLE INOP
CALLOUTS INOP
GPWS INHIBITED
TERRAIN INHIBITED
SELF-TEST INHIBITED
During system self-test, all INOP annunciators are activated and TERR TEST in shown on the INAV.
Level 1 self-test is used to verify proper operation of the EGPWS on the ground as follows:
Ensure that adequate aircraft power is available and the EGPWS and associated systems are powered.
Ensure that any EGPWS inhibiting switches are in the normal (non--inhibiting) position.
Verify that EGPWS inoperative annunciators are out. If an inoperative annunciation is indicated, perform the EGPWS self--test (below) and then seek corrective action if the inoperative condition persists.
If a terrain display is enabled, select terrain to be displayed.
Momentarily push the EGPWS self-test switch.
When a self-test is initiated, the EGPWM first checks for any configuration (installation or database) errors. If any are detected it is audibly enunciated and the test is terminated. If no errors are detected, the test continues through a sequence resulting in turning on and off all system annunciators, and enunciating specific audio messages. Any functions determined inoperative are also enunciated (e.g., GLIDESLOPE INOP). The self-test terminates automatically at its conclusion.
The following is the self-test sequence:
The white TERR TEST message is displayed on INAV.
The blue GPWS 1-2 FAIL message is displayed on the CAS.
The blue WINDSHEAR 1-2 FAIL message is displayed on the CAS.
The blue EGPWM SYS 1-2 FAIL message is displayed on the CAS.
All fail messages are turned off.
The amber GND PROX message is displayed on the PFDs.
The aural “GLIDESLOPE” message is enunciated.
The amber GND PROX display message turns off.
The red PULL UP message is displayed on the PFDs.
An aural “PULL UP” message is enunciated.
The red PULL UP display message turns off.
The red WINDSHEAR message is displayed on the PFDs.
The aural “WINDSHEAR, WINDSHEAR, WINDSHEAR” message is enunciated.
The red WINDSHEAR message is turned off.
The amber WINDSHEAR message is displayed momentarily on the PFDs.
The red PULL UP message is displayed on the PFDs,
INAV is displayed to the 5NM range ring.
An aural “TERRAIN, TERRAIN, PULL UP” message in enunciated.
The red PULL UP display message turns off.
The amber GND PROX message is displayed on the PFDs
The aural RUNWAY AWARENESS OK message is annunciated in one of the following methods based on APM selection:
RUNWAY AWARENESS OK, feet (female voice)
RUNWAY AWARENESS OK, feet (male voice)
RUNWAY AWARENESS OK, meter (female voice)
RUNWAY AWARENESS OK, meter (male voice).
Verify expected indications and enunciations during test, repeating as necessary noting any erroneous conditions.
A successful test is accomplished if all expected indications are observed and no inoperative functions or display anomalies are indicated or observed.
So why are those other modes missing? Reading further we see this:
[G450 AOM, §2B-20-140; ¶5] Maintenance Interface with the CMC
The EGPWM maintenance philosophy is to provide information that encourages the line mechanic to correct the real problem (analyze the correct LRU/LRM) by indicating whether the failure is within the EGPWM or one of the input sources. The EGPWM provides extremely clear (not necessarily detailed) fault messages and gives them with minimum effort on the part of the maintenance crew.
The EGPWM supports an interface to the central maintenance computer. The CMC is used by maintenance personnel to examine the status of the various LRUs and modules onboard the aircraft in order to facilitate correction of failures.
The G450 Maintenance Manual contains a brief procedure that is nothing more than the pilot's Level 1 test. But if you drill down through the CMC, you can find a diagnostic. Here are screen shots from just that:
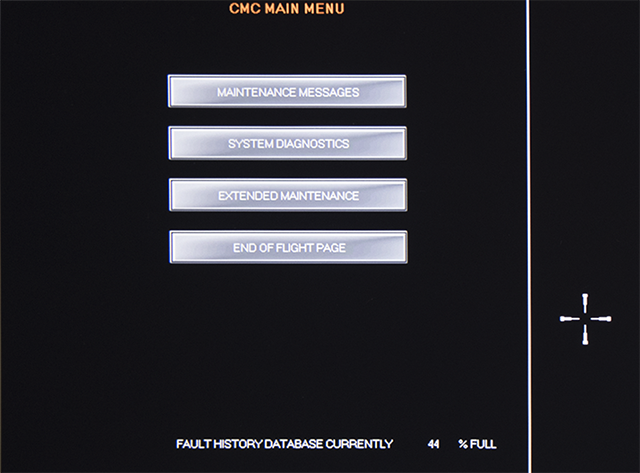
Photo: CMC Main Menu, from Eddie's aircraft.

Photo: CMC System Diagnostics Menu, from Eddie's aircraft.

Photo: CMC System Diagnostic Menu / 34 Navigation, from Eddie's aircraft.

Photo: CMC 34 Navigation / 46 Enhanced Ground Prox Warning 1, from Eddie's aircraft.
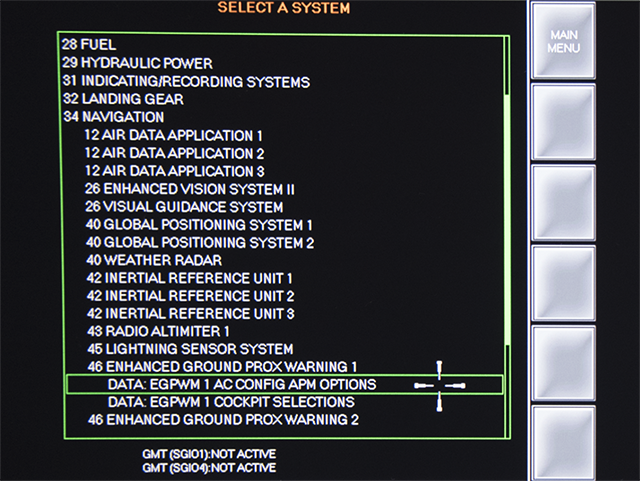
Photo: CMC Data: EGPWM 1 AC Config APM Options, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 1/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 2/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 3/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 4/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 5/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 6/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 7/9, from Eddie's aircraft.

Photo: CMC EGPWM1 AC Config Options 8/9, from Eddie's aircraft.
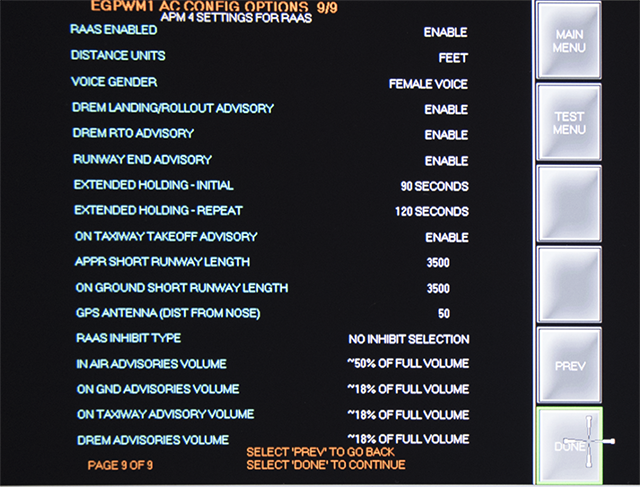
Photo: CMC EGPWM1 AC Config Options 9/9, from Eddie's aircraft.

Photo: CMC DATA EGPWM2 Cockpit Selections, from Eddie's aircraft.

Photo: CMC EGPWM1 Cockpit Selections, from Eddie's aircraft.
If anyone can offer a better explanation for the EGPWS test procedure, please "Contact Eddie" below. If anyone from Honeywell can offer an up-to-date manual, please "Contact Eddie" below. (He is willing to pay for it. He is still a bit sore about spending $500 for the manuals he has, but he gets over things quickly.)
Enhanced Vision System
An "Enhanced Vision System" (EVS), an "Enhanced Flight Vision System" (EFVS), and a "Forward Looking Infrared Receiver" (FLIR) might refer to the same thing or maybe completely different, depending on what you are reading. The distinction can be important:
The FAA thinks of EFVS as the infrared system viewed through a HUD while an EVS is viewed through a PFD. An EFVS can be used, under some conditions, to fly below published minimums. An EVS cannot.
The European Union uses EVS to refer to what our FAA calls EFVS. ([EU Ops 1, Subpart E, Section OPS 1.430, Appendix 1, ¶(h)])
Gulfstream calls its EFVS an EVS, while the FLIR is simply the camera. When reading a Gulfstream manual, EVS is EFVS.
Whatever you call it, EFVS (EVS in the G450) can lower your approach minimums under some circumstances, see Enhanced Flight Vision Systems for more on this.
Here's a video of the EVS in action: It's Magic.
General Description
[G450 Aircraft Operating Manual §2A-34-90 ¶1.]
The Enhanced Vision System (EVS) increases the ability of the pilot to see the external environment during periods of low light or reduced visibility by converting infrared radiation frequencies into visible imagery viewed on the Head Up Display (HUD). While normal human sight is limited to the 400 - 800 nanometer frequencies, the Forward Looking Infrared Receiver (FLIR) camera in the EVS detects frequencies down to the 1,300 - 4,900 nanometer range. The composite display imagery of flight guidance cues and infrared heat sources is particularly effective in low visibility approaches since the frequency range of the EVS encompasses the heat given off by runway and taxiway lighting and the higher temperature levels of the paved surfaces warmed by airplane ground operations. The EVS incorporates selective filtration to attenuate or lessen the heat bloom from runway lights and sequenced flashers, providing a more refined view of the airport environment.
The infrared camera field of view is thirty degrees (30°) horizontally and twenty degrees (20°) vertically. Imagery captured by the camera is routed through a processor that converts the infrared picture to a raster format and communicates the formatted data to the HUD overhead unit. The overhead unit synchronizes the data with the navigational and situational symbology presented on the HUD combiner to display a congruent image with an extended visual range. The composite display imagery of flight guidance cues and infrared heat sources is particularly effective in low visibility approaches since the frequency range of the EVS encompasses the heat given off by runway and taxiway lighting and the higher temperature levels of the paved surfaces warmed by airplane ground operations. The EVS incorporates selective filtration to attenuate or lessen the heat bloom from runway lights and sequenced flashers, providing a more refined view of the airport environment.
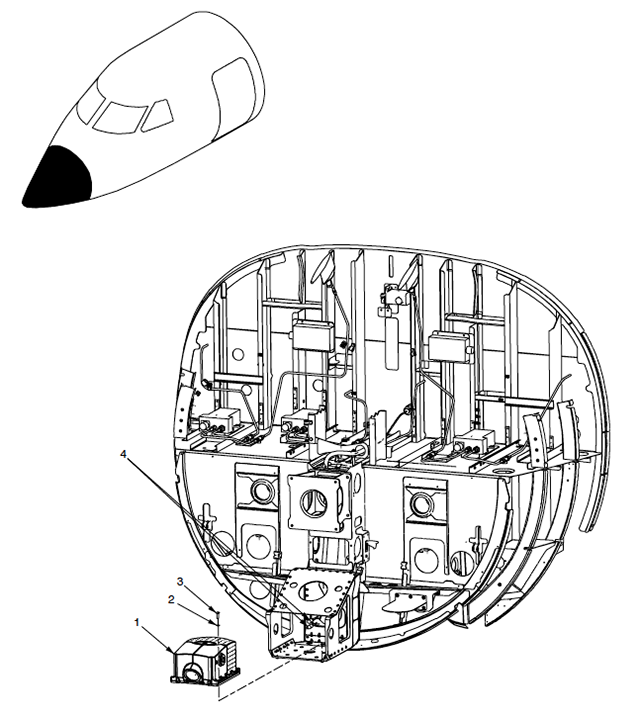
Infrared Camera (FLIR)
[G450 Aircraft Operating Manual §2A-34-90 ¶2.B]
The infrared camera is mounted in the nose of the airplane behind the EVS window. The installation of the camera requires careful alignment with transits and levels to focus the camera in the same line of sight as the Head Up Display (HUD) in order that the infrared image will conform to the data displayed on the HUD combiner. The camera assembly incorporates a series of lenses to focus the infrared energy received through the window onto a sensor plate. The sensor plate is composed an array of pixels arranged in a 320 X 240 format. The individual pixels are 30,000 nanometers square and detect infrared radiation. The patterns of infrared detected by the pixels are amplified and converted into electrical signals that forwarded to the system processor where they are formatted into raster images.
The camera is enclosed within a casing that is temperature controlled by a cooling unit. The actual camera operating temperature is seventy-seven degrees Kelvin (77°K) or minus three hundred twenty-one degrees Fahrenheit (-321°F) / minus one hundred ninety-six degrees centigrade (-196°C). When the EVS system is initially selected ON, a time delay of approximately thirty (30) minutes is required for the cooling unit to reduce the temperature within the camera enclosure to operating range.
The exterior of the camera enclosure, window hardware and processor also require cooling airflow to ensure proper operation. A duct routing conditioned air to the components provides an air supply at lower airplane operating altitudes. The valve, located in the lower cockpit supply duct, closes at eighteen thousand feet (18,000 ft) since temperatures at that flight level are low enough for ambient cooling and the EVS is not normally required above that altitude. The air supply valve is controlled by the same relay that extinguishes the landing lights.
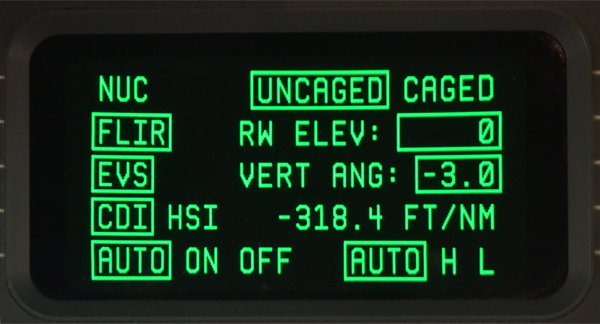
Figure: G450 Display Controller HUD Menu, from Eddie's aircraft.
Display Controller Menu
The Display Controller HUD menu controls both the HUD and the Enhanced Vision System (EVS).
The HUD options are discussed here: G450 Heads Up Display System / Display Controller Menu. The EVS options are as follows:
[G450 Aircraft Operating Manual, §2A-34-100, figure 31.] EVS SELECTIONS ON HUD MENU:
NUC (Non-Uniformity Correction): Selects NUC ON and OFF. Default is OFF.
FLIR: Selects FLIR camera ON and OFF. Selecting FLIR camera OFF also selects EVS OFF (if it is ON). It may take up to 10 minutes to appear when FLIR is selected ON.
EVS: Selects EVS ON and OFF. Selecting EVS ON also selects FLIR camera ON (if it is OFF).
AUTO / H / L: Toggles FLIR camera through AUTO, high (H) and low (L) gain settings. Default is AUTO.
The description notwithstanding, the EVS selections are actually not to hard to difficult:
The system does a NUC for you at certain times but you can force it to do one anytime you like by pressing this button.
The FLIR is the camera alone. You can turn the FLIR on by itself with no EVS, but if you turn the FLIR off, the EVS isn't going to work so it will turn itself off.
The EVS is the infrared system that gets you below minimums and it can't work without the FLIR. So if you turn on the EVS and the FLIR is off, both systems come on.
The FLIR gain can be forced into high setting if you find the need to do so.
Non Uniformity Corrections (NUCs)
[G450 Aircraft Operating Manual §2A-34-90 ¶2.C.]
The [EVS processor] monitors window heat states and performance, initiates camera enclosure cooling, performs camera pixel sensitivity level tests called Non Uniformity Corrections (NUCs), and initiates a Built In Test (BIT) on command of the Monitor and Warning System (MWS) at EVS start up.
The processor controlled NUC tests are essential to maintaining a proper signal to noise ratio for the camera sensor plate. The tests correct the sensitivity of each pixel to a normal response value at a standard temperature. When the EVS is initially powered, the processor initiates an extended NUC that involves calibrating pixel response at two distinct temperature levels that requires four (4) minutes to complete. During an approach when flaps are extended past ten degrees (10°), the MWS prompts a shorter duration NUC at a single temperature level to prepare the EVS for use during landing. A NUC can be manually selected at any time with a Line Select Key (LSK) on the HUD page of the Display Controller.
Qualification to Lower Minimums
[FAA GIV-X/GV/GV-SP FSB report, ¶1.9.3.] From February 1998 to August 2001 the GV FSB Chairman participated with the FAA Los Angeles Aircraft Certification Office in EVS development, proof of concept, and certification flight tests. Those flights included over 50 EVS approaches conducted at approximately 15 different airports during day, night, Visual Meteorological Conditions (VMC) and Instrument Meteorological Conditions (IMC). Gulfstream’s GV EVS Airplane Flight Manual Supplement was evaluated and found acceptable during the certification flight tests. In September 2001 two GV FSB members received EVS ground school, simulator, and airplane training from Gulfstream Aerospace Corp. (GAC), in Savannah, GA. It was found to be operationally suitable. EVS meets the requirements of EFVS (Enhanced Flight Vision System) as defined in FAR 91.175.
[FAA GIV-X/GV/GV-SP FSB report, Appendix 7] EVS meets the requirements of EFVS (Enhanced Flight Vision System) as defined in FAR 91.175. Flight crewmembers may use EVS to meet the visibility requirements of Title 14 CFR Section 91.175 provided that vertical guidance with reference to an obstacle-free path is used.
The G450 EVS can be used to fly below published minimums under specific conditions.
Refer to Enhanced Flight Vision System for more on this, as well as 14 CFR 91.175.
Training Requirements
[FAA GIV-X/GV/GV-SP FSB report, Appendix 7] Flight crewmember training must include a review of Title 14 CFR Section 91.175 and a review of the associated EVS AFM system description, limitations, and procedures. Flight crewmember training must be accomplished using a level 'C' simulator, with a daylight visual display, or a level 'D' simulator that has been qualified by the National Simulator Program for EVS, or the aircraft. The FSB has determined that each pilot in command of an aircraft equipped with EVS should receive a minimum of 4 hours of ground school training followed by a minimum of 2 hours of simulator training in the left seat of a level 'C', with a daylight visual display, or level 'D' simulator. An EVS equipped aircraft may also be used in lieu of a simulator for training. In-flight training should consist of a minimum of 2 hours of flying in the left seat of the EVS equipped aircraft. The flight portion of the training should consist of a minimum of two (2) day and two (2) night approaches each with vertical guidance.
Checking requires a proficiency check conducted in a level 'C' simulator, with a daylight visual display, in a level 'D' simulator, that has been qualified by the National Simulator Program for EVS, or on an EVS equipped aircraft. The proficiency check will include at least one instrument approach to published minimums and landing utilizing the EVS. This check can be accomplished concurrently with a proficiency or competency check under 61.57, 61.58, 121.441, 135.293, or 135.297. Currency: If 61.57 (c) is being used for currency, at least one of the 6 required instrument approaches must be accomplished using EVS to published minimums.
EVS Window and Heating Controls
[G450 Aircraft Operating Manual §2A-34-90 ¶2.A.] The EVS window is manufactured from one quarter inch thick synthetically grown sapphire is highly transparent to infrared thermal frequencies, allowing 98% transmissivity to airfield and approach lighting systems. The window is mounted in an aluminum frame beneath the radome and incorporates a grid of resistive metallic elements and three thermostats. The window is heated to a temperature between 12° - 14°C to prevent the formation of ice and to ensure uniform radiation transparency.
EVS Camera
[G450 Aircraft Operating Manual §2A-34-90 ¶2.B.] The camera is enclosed within a casing that is temperature controlled by a cooling unit. The actual camera operating temperature is -321°F. When the EVS system is initially selected ON, a time delay of approximately 30 minutes is required for the cooling unit to reduce the temperature within the camera enclosure to operating range.
EVS II Power On Operation
[G450 Aircraft Operating Manual §2A-34-100 ¶2.A.] When power is applied to the EVS II system and the airplane is on the ground, a Power-up BIT (PBIT) is performed, taking 15 seconds. When power is applied in the air, the EVS II skips the Power-up BIT and completes initialization within 5 seconds. Then an automatic Built-In-Test (BIT) sequence is initiated; all system functions are checked. The BIT takes approximately 1 minute. When initially powered, the EVS II FLIR may take up to 15 minutes to cool its detector to operating temperature and activate for an initial power-on. If the EVS has been previously activated, this activation period may be shorter depending on the deviation from nominal operating conditions that has occurred since power-off. When the aircraft is parked overnight in temperatures below -40°C, the EVS II FLIR may take up to 35 minutes to heat the electronics to operating temperature and to cool the detector to operating temperature. Once the FLIR is cooled to temperature, the EVS II will perform a NUC and then enable video to be displayed on the HUD. The NUC completes its cycle within 1 minute.
EVS II Failure to Power-up
Enhanced Vision System (EVS) II have been experiencing a nuisance failure upon application of electrical power. The symptoms of the condition are the amber EVS Fail (A) and blue EVS Maintenance Required (B) Crew Alerting System (CAS) messages, accompanied by the Central Maintenance Computer (CMC) Active Maintenance Message "FLIR Rx Fiber Fault". After cycling power as described below, the system behaves normally.
Ensure EVS is commanded ON (not STANDBY) (Display Controller Head-Up Display [HUD] Menu) then pull Forward-Looking Infra-Red (FLIR) camera and processor Circuit Breakers (CBs) for one second (pilot's overhead CB panel).
Close FLIR CB then the processor CB.
Allow up to 15 minutes (most likely around 10 minutes) for FLIR to cool and video to be valid before selecting EVS on the HUD.
The operator may choose to view EVS temperatures on the CMC screen during the FLIR cool down to check that FLIR-to-processor communications are working. If the FLIR temperature is 127 degrees Celsius or higher, FLIR-to-processor communications are not operating properly. If valid temperatures are displayed, FLIR-to-processor communications are functioning normally.
EVS II Limitations
[G450 Aircraft Operating Manual §2A-34-100 ¶5]
The HUD or HUD II section of the G450 Operating Manual must be immediately available to the flight crew whenever use of the EVS system is contemplated.
At 100 feet HAT, visual cues must be seen without the aid of EVS or EVS II to continue descent to landing.
EVS may be used only by qualified pilots who have been trained in accordance with requirements listed in the FAA G450 Flight Standardization Board (FSB).
Flight Director or autopilot with vertical guidance is permitted for all IMC EVS approaches.
EVS, as installed, meets the requirements of EFVS (Enhanced Flight Vision System) as defined in 14 CFR Part 91.175.
For more details on the requirements of 14 CFR 91.175 and the ability to continue an approach to 100 feet HAT, see Enhanced Flight Visions Systems.
Inertial Reference Units
Power Source
[G450 Aircraft Operating Manual, §2B-14-10] In normal operation, the Micro IRUs operate only from the primary input power source when the primary input power is between 18 and 36 V dc. If the primary input power source voltage is less than 18 V dc, the Micro IRUs switch to and operate from the secondary input power source if the secondary input power source is between 18 and 36 V dc. If the Micro IRUs are operating on the secondary input power source and the primary input power source increases to a voltage greater than 19 V dc, the Micro IRUs switch back and operate (normally) from the primary input power source.

The IRUs on the G450 don't have to make a distinction between primary and secondary input power since all IRU electrical power goes through the E-Batts. If Essential DC is not available, the E-Batt automatically takes over.
Alignment
[G450 Aircraft Operating Manual, §2B-14-20 ¶10.] The Micro IRUs automatically select the correct alignment mode.
The stationary alignment mode is the primary method of alignment. This mode is selected when the aircraft is on the ground and not moving. The normal procedure is to perform a Stationary Alignment only once at the beginning of each day. The time required to complete a stationary alignment varies with latitude, and ranges from 5 to 17 minutes. The alignment can fail if the Micro IRUs sense excessive motion during the initialization process, or if the Micro IRUs fail to receive an initialization position. A position can be obtained from the onboard NAV systems or entered by the pilot.
The Align in Motion (AIM) initializes the IRS while in the air to recover full IRU navigation capability. This mode is selected if power is lost in flight. The time required to complete an AIM varies as a function of aircraft motion, and ranges from 15 to 30 minutes. When the Micro IRUs are performing an AIM, the flight crew is notified by the crew alerting system message system.
Stationary alignment and AIM modes are performed in conjunction with the attitude mode before entering the navigation mode. AIM requires valid data from the GPS. If the AIM fails the Micro IRUs are left in the attitude mode (attitude data available, positional data unavailable).
Auto Realign
[G450 Aircraft Operating Manual, §2B-14-20 ¶11.] The auto realign mode is performed in conjunction with the navigation mode when the aircraft is stationary, to maintain optimal performance. An extended or preflight auto realign maintains optimal IRS attitude and navigation performance when the aircraft is motionless prior to flight. While the system is in the extended or preflight auto realign mode, the time in navigation remains constant and is not incremented. The IRS enters post flight auto realign mode following a flight when the aircraft has been motionless for 7.5 to 15 minutes. The GPS position is used to automatically reinitialize the Micro IRUs position if the GPS position is available and valid. This mode is equivalent to a stationary alignment and a post flight auto realign resets the time in navigation to zero. Auto realign mode automatically realigns the Micro IRU between flights. The auto realign mode is performed in conjunction with the navigation mode.
Sensor Logic
[Honeywell Direct To Dec 2012] The G450 Hybrid IRS changes the sensor priority we all grew up with: GPS, DME/DME, VOR/DME, IRS. With FMS 7.1 and the hybrid IRS, the IRU remains in charge so long as it can check in with GPS. If the aircraft loses GPS, the IRU remains in charge until another sensor is at least 40% better.
End of Flight
[G450 Aircraft Operating Manual, §2B-14-20 ¶14.] The Micro IRUs automatically enter this mode after a flight when the aircraft has been motionless for five seconds. The end of flight mode stores navigation performance records, auto calibration data, and other miscellaneous information following each flight. Data considered important in the repair of the IRUs are stored in a nonvolatile memory at the end of flight. End of flight mode requirements are performed while the Micro IRUs are either in navigation or attitude mode. It takes the inertial reference system less than five seconds to perform the functions of the end of flight mode. Power can be removed from the unit any time without risk of record corruption.
Navigation Radio Tuning
[GV Aircraft Operating Manual §2B-06-50.12] (You won’t find this in the G450 manual.) The most reliable indicator for navigation radio tuning status is on the MCDU PROGRESS page, next to the frequency. The letter decodes as follows:
A (auto tune). The FMS is tuning the VOR.
M (manual tune). The frequency was entered manually. In the GV, the selection was made from the radio control head, which of course does not exist in the G450. In the G450 the M will appear if "FMS Tune" is turned off. This deactivates the ability to tune from the PROG page only.
R (remote tune). The frequency selection was made remotely. In a Planeview airplane that means it was done from the MCDU.
V (VOR displayed as nav source, auto tune suspended). Auto tuning was active when NAV is selected as the navigation source, or is previewed. Auto tune is suspended but will resume if the nav source is returned to FMS.
This seems to be a big deal for some pilots, I'm not sure why. If you see V that means you are either navigating by the indicated raw data or you have it previewed. You will need to change your navigation source or deselect Preview if you want to change this.
RAAS
G450 AOM, ¶2B-20-90] The runway awareness and advisory system (RAAS) function supplies improved situational awareness for the flight crew. This improved situational awareness helps lower the probability of runway incursion incidents and accidents by providing timely aural advisory messages to the flight crew during ground taxi, takeoff (including rejected takeoffs), final approach, and landing/rollout operations. The advisories are generated based on the current aircraft position when compared to the location of the airport runways. The airport runways are stored in the threat database (internal EGPWS terrain/obstacle/airport database).
Approaching Runway (On Ground)
Provides the flight crew with awareness of a proximate runway edge being approached by the aircraft during taxi operations. The conditions are:
Aircraft must be on the ground, and
Aircraft groundspeed is less than 40 kts, and
Aircraft is within trigger distance of the runway.
On Runway (On Ground)
Provides the crew with awareness of which runway the aircraft is lined--up with during ground operations. The conditions are:
Aircraft must enter a runway, and
Aircraft heading is within ± 20° of runway heading.
Radar
I spent my first twelve years of flying with a navigator who did all the radar work, the next several at the 89th in airplanes where the radar system didn't work because they weren't connected properly until we figured that out. Now I am spending the rest of my aviation career trying to learn how to use radar more effectively. The problem with the radar in the G450 is finding out how it works. The source material is a poor start:
G450 Operating Manual 2A-31-90 — Incomplete and somewhat misleading
G450 Operating Manual 2B-15-30 — Incomplete and somewhat misleading from a PlaneView point of view
You are better off with the Honeywell A28-1146-102-00 Primus 880 Pilot's Guide, a hard to find document you can have when you buy a G450. What follows is taken mostly from the Honeywell manual.
[G450 AOM ¶2A-31-90 ¶1.] The G450 is equipped with a PRIMUS-880 weather radar system incorporating a 24 inch flat plate radar antenna mounted in the nose cone that acts as both receiver and transmitter. The installation is referred to as a Receiver / Transmitter / Antenna or RTA. The RTA operates in the X-band radio frequency range (9,375 ±25 MHz) and provides both weather (precipitation) detection and ground terrain mapping.
Reboot Time
Now and then you might have to "reboot" when the aircraft doesn't power up correctly. I heard that all you have to do is bring the airplane down to a no power state, count to ten, and then bring it back up. I've also heard 5 minutes, 10 minutes, and 12 minutes. What's the real answer? This from a Gulfstream Journal which I'll cut and paste.
[The Gulfstream Journal, 7/19/2019]
G350™/G450™/G500-5000™/G550™/G650™/G650ER™ (ATA 24): Recommended Minimum Power Down Time
By Jeremy Kelly, Customer Support Avionics/Electrical Group
Certain scenarios arise where aircraft power will need to be cycled. This is mainly done to assist in isolating Crew Alerting System (CAS) messages or other faults and verify if the failures are hard failed (non-resettable) or if they clear. The most accessible information for pilots will be from the Airplane Flight Manual (AFM), which gives a reference of 1 minute for power down. If the message persists, Technical Operations will, most often, be brought into the loop to provide additional support.
Tech Ops’ recommendations go deeper into the technical functionality of the different aircraft systems to better isolate the issue. One of the more common recommendations is to completely power down the aircraft for a MINIMUM of 15 minutes. The reason for the difference in time, lies in the sub-functions of different systems, specifically related to “keep alive” power. Keep alive power, either from batteries or capacitors, allows the system to absorb power interruptions or provide additional power to complete essential tasks after aircraft power has been removed. So, powering the aircraft before the capacitors have fully discharged or the systems have fully shut down means those specific functions will not actually reboot as intended.
The most notable system this applies to the Central Maintenance Computer (CMC). The CMC specifically has keep alive power applied to it for an additional 12 minutes after all aircraft power has been removed. This is to allow the CMC to finish recording the Fault History Data Base (FHDB), Aircraft Condition Monitoring Function (ACMF), and additional data logs. The CMC is a large part of CAS message generation and display. Knowing this information, Tech Ops will recommend power be removed completely for 15 minutes.
The addition of 3 minutes is to ensure the 12 minutes have completely elapsed and all systems have powered down to eliminate any human errors in time keeping. Powering down the aircraft for a full 15 minutes ensures the CMC will power down completely. This provides a complete reset of the CMC and all software functions.
This data is extremely valuable to Tech Ops, as it will determine if the fault is a hard fault or is resettable. These two options tend to drive troubleshooting techniques in very different ways. Power cycling for 15 minutes ensures the Tech Ops Specialist is optimizing troubleshooting techniques for your specific scenario, based on the data provided.
SELCAL (Programming)
Unlike some aircraft, your SELCAL code is set into hardware via the software of your Audio Control Panel (ACP). I've heard that sometimes the ACP will lose the code on its own for some reason. Knowing how to program it quickly can save you from hours of monitoring the HF, but you have to detect the problem before you takeoff, it can only be set on the ground. To ensure your code is set, press the SELCAL button on the ACP and you should see your code displayed. If not, here's how you fix it. (You can find this in the G450 Maintenance Manual, ch 23, §23-50-00)
Power up the airplane normally.
Enter the input mode: press and hold the COM1 MIC, ICS, and HDPH buttons simultaneously for 5 seconds, the ACP will display CONFIG.
Use the ICS and HDPH buttons to scroll through the various configuration items; pressing HDPH moves you forward and the ninth item should be the first character of your SELCAL code, labeled SCL1: S (if "S" was set as the first letter).
Rotate the SET knob until the letter matches what you need to set, notice that an asterisk appears if the letter is different than exists in memory. Press the COM1 MIC button to save this selection. (Notice the asterisk goes away)
Use the ICS and HDPH buttons to scroll to the SCL2, SCL3, and SCL4 to enter each of the next letters in the same fashion as the first.
Exit the input mode: press and hold the COM1 MIC, ICS, and HDPH buttons simultaneously for 5 seconds, the display should show SAVE: Y.
Press and hold the COM1 MIC, ICS, and HDPH buttons simultaneously for 5 seconds to save the changes. The panel will save SAVING and then BCASTING. Once you see BCASTING you can release the buttons. The ACP you used will broadcast the changes to the other ACPs.
Check the other ACPs to confirm your changes were made.
For a demo, see this video: Setting SELCAL in a G450. (This works in a G550 too.)
WC-884 Weather Radar Controller Operation
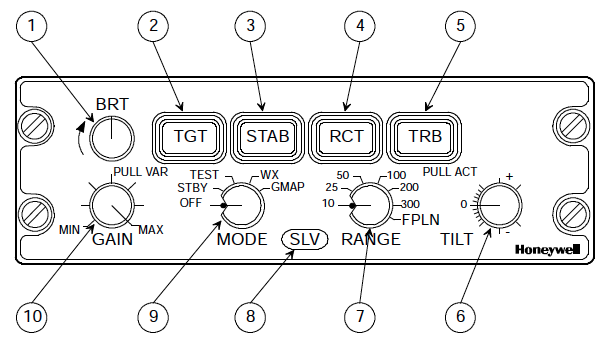
Figure: WC-884 Controller, from Honeywell Primus 880 Pilot's Guide, figure 3-5.
[Honeywell Primus 880 Pilot's Guide, pages 3-20 to 3-26]
BRT (Brightness). The BRT switch is a rotary control that is used to set the radar (raster) brightness on the EFIS display.
TGT (Target Alert). The TGT switch is an alternate-action, button that enables and disables the radar target alert feature. Target alert is selectable in all but the 300-mile range. When selected, target alert monitors beyond the selected range and 7.5° on each side of the aircraft heading. If a return with certain characteristics is detected in the monitored area, the target alert changes from the green armed condition to the amber TGT warning condition. The amber TGT alerts the pilot as to potentially hazardous targets directly in front and outside of the selected range. When the alert is given, the pilot should select longer ranges to view the questionable target. Target alert is inactive within the selected range.
STB (Stabilization). The STAB button is an alternate-action button that turns the pitch and roll stabilization ON and OFF. This radar is normally attitude stabilized. It automatically compensates for roll and pitch maneuvers. The amber STB annunciator appears on the screen. It is also used with the STB adjust mode, and to override forced standby.
RCT (Rain Echo Attenuation Compensation Technique). Selecting RCT forces the system to preset gain. When RCT is selected, the green REACT legend is displayed in the mode field. The RCT circuitry compensates for attenuation of the radar signal as it passes through rainfall. The cyan field indicates areas where further compensation is not possible. Any target detected within the cyan field cannot be calibrated and should be considered dangerous. All targets in the cyan field are displayed as fourth level precipitation, magenta.
This radar uses National Weather Service video integrator processor Weather Radar Calibration to represent intensities in standard color levels. Some returns can cause Weather Attenuation and can hide weather at a further ranges. The RCT button adjusts the Radar Gain using the Honeywell Rain Echo Attenuation Compensation Technique.
TRB (Turbulence Detection). TRB switch is used to select the turbulence detection mode of operation. The TRB mode can only be selected if the MODE switch is in the WX position and the selected range is 50 miles or less. The weather/turbulence mode is annunciated in the mode field with the green WX/T legend. Areas of at least moderate turbulence are shown in soft white.
CAUTION: TURBULENCE CAN ONLY BE DETECTED WITHIN AREAS OF RAINFALL. THE PRIMUSR 880 DIGITAL WEATHER RADAR SYSTEM DOES NOT DETECT CLEAR AIR TURBULENCE.
Selecting the 100-, 200-, or 300-mile range turns off the turbulence detection. The /T is deleted from the mode annunciation and variable gain is engaged if previously selected. Subsequent selection of ranges of 50 miles or less re-engages turbulence detection.TILT. The TILT switch is a rotary control used to select tilt angle of antenna beam with relation to the horizon. CW rotation tilts beam upward to +15°; ccw rotation tilts beam downward to -15°. A digital readout of the antenna tilt angle is displayed on the EFIS. When the TILT control knob is pulled out, the system engages the Altitude Compensate Tilt (ACT). In ACT, the antenna tilt is automatically adjusted with regard to the selected range and barometric altitude. The antenna tilt automatically readjusts with changes in altitude and/or selected range. In ACT, the tilt control can fine tune the tilt setting by ±2°. ACT is annunciated with an A following the digital tilt legend. The digital tilt readout always shows the commanded tilt of the antenna regardless of the tilt command source (ACT command or manual tilt command).
ACT is not "Auto Tilt." If you have the tilt set where you want it and change the range, it adjusts for you. But it only does this plus or minus two degrees. Proper Radar Tilt Management means you really should be moving the tilt up and down to view more than just one slice of the sky in front of you.
RANGE. RANGE is a rotary control used to select one of six ranges (10, 25, 50, 100, 200, and 300 NM). The seventh position of the range switch is flight plan mode.
The range control on the G450 radar controller does not have range numbers since you can also adjust the range from the cursor control device. The selected range will be indicated on the display unit.
SLV (Slave). The SLV annunciator is a dead front annunciator that is only used in dual controller installations. With dual controllers, one controller can be slaved to the other by selecting the RADAR mode switch to OFF on that controller, only. This slaved condition is annunciated with the SLV annunciator. In the slaved condition both controllers must be off before the radar system turns off.
MODE. The MODE switch is a rotary switch used to select one of the following functions:
OFF - In this position the radar system is turned off.
STBY - In this position the radar system is placed in standby; a ready state, with the antenna scan stopped, the transmitter inhibited, and the display memory erased. STBY, in green, is displayed in the mode field. If STBY is selected before the initial RTA warm up period is complete (approximately 45 - 90 seconds), the flashing WAIT legend is displayed in the mode field. When the warm up is complete, the system changes the mode field from WAIT to STBY.
TEST- This position selects the radar test mode. A test pattern is displayed to verify that system operates. The green TEST legend is displayed in the mode field. Refer to Section 4, Normal Operation, for a description of the test pattern.
WX - In this position, the radar system is fully operational and all internal parameters are set for en route weather detection. If WX is selected before the initial RTA warm up period is complete, a flashing WAIT legend is displayed. In WAIT mode, the transmitter and antenna scan are inhibited and the memory is erased. When the warm up is complete, the system automatically switches to the WX mode and a green WX is displayed in mode field. The system, in preset gain, is calibrated as follows:

GMAP - Selecting GMAP places the radar system in the ground mapping mode. The system is fully operational and all internal parameters are set to enhance returns from ground targets. RCT compensation is inactive. When GMAP is selected, a green GMAP legend is displayed and the color scheme is changed to cyan, yellow, magenta. Cyan represents the least reflective return, yellow is a moderate return, and magenta is a strong return. If GMAP is selected before the initial RTA warm up period is complete, a flashing WAIT legend is displayed. In WAIT mode, the transmitter and antenna scan are inhibited and the memory is erased. When the warm up is complete, the system automatically switches to the GMAP mode.
FSBY - Forced standby is an automatic, non-selectable radar mode. As an installation option, the controllers can be wired to the WOW squat switch. When wired, the RTA is in the forced standby mode when the aircraft is on the ground. In the forced standby mode, the transmitter and antenna scan are both inhibited, the memory is erased, and the amber FSBY legend is displayed in the mode field. When in the forced standby mode, pushing the STAB button 4 times in 3 seconds, exits the mode. FSBY mode is a safety feature that inhibits the transmitter on the ground to eliminate the X-band microwave radiation hazard.
GAIN. The GAIN is a single-turn rotary control and push/pull switch that is used to control the receiver gain. When the GAIN switch is pushed, the system enters the preset, calibrated gain mode. Calibrated gain is the normal mode and is used for weather avoidance. In calibrated gain, the rotary portion of the GAIN control does nothing. When the GAIN switch is pulled out, the system enters the variable gain mode. Variable gain is useful for additional weather analysis and for ground mapping. In WX mode, variable gain can increase receiver sensitivity over the calibrated level to show weak targets or it can be reduced below the calibrated level to eliminate weak returns.
With the gain pushed in, you are getting Calibrated Weather. You should only use manual gain to detect weather ahead of a return that may be too weak or behind a return you think might be in a shadow.
Synthetic Vision System
General Description
[G450 Aircraft Operating Manual, §2B-26-10] The synthetic vision system (SVS) gives a 3-dimensional view of surrounding terrain, obstacles, and runways in addition to standard flight and navigation data. When selected for display, SVS data is displayed on the PFD. Synthetic vision works by rendering terrain elevation data oriented in real-time to aircraft attitude and altitude.
Symbology

Figure: G450 SVS symbol locations, from G450 Aircraft Operating Manual, §2B-06-10, figure 13.
Symbol Positions
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.A.]
The airspeed and altitude tapes are moved outboard from the standard FULL PFD by approximately 1.4 inches on the display along with associated cutouts.
The lateral deviation scale is removed from the PFD when SVS is selected on the DC.
All annunciations, comparators, and data cutouts are repositioned to locations in accordance with the following order. The display priority of symbols on the PFD are as as follows:
SVS Flight Path Marker (FPM)
Magenta FPM
Aircraft symbol (boresight, cross-pointer, or single-cue aircraft symbols)
Flight Director (FD)
Heading triangle
Zero-pitch line
Attitude pitch tape
Terrain (including airport, runway, and obstacle symbols).
Bore Sight

Figure: G450 SVS bore sight, from G450 Aircraft Operating Manual, §2B-06-10, figure 14.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.B.] The boresight is a small V shaped symbol that represents the pitch axis of the aircraft. The boresight is displayed when the FD CMD mode on the DC is set to HUD. The boresight symbol is displayed laterally in the center of the display and aligned vertically with the airspeed/altitude readout.
Pitch Ladder

Figure: G450 SVS pitch ladder, from G450 Aircraft Operating Manual, §2B-06-10, figure 15.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.C.] The pitch ladder consists of white horizontal pitch lines spaced vertically every 5 degrees. Each pitch line is divided horizontally into two sections laterally separated by a space the width of the HUD FD. Small winglets are displayed on the outboard ends of each half of the pitch lines pointing toward the zero-pitch line. The numerical pitch value of each pitch line is displayed, with a small offset, on either side of the pitch line winglets. The negative pitch lines are dashed, with five segments on either side.
Figure: G450 SVS standard red chevron, from G450 Aircraft Operating Manual, §2B-06-10, figure 16.
The entire pitch ladder is rotated/translated to aircraft roll and/or pitch. If the aircraft enters an intermediate or unusual attitude condition, red chevrons are displayed on the PFD pointing toward the zero-pitch line. The red chevrons are displayed between the 25/30, 30/35, -25/-30, and -30/-35 degrees pitch lines in the pitch up attitude and pitch down attitude, respectively.
Zero Pitch Line

Figure: G450 SVS zero pitch line, from G450 Aircraft Operating Manual, §2B-06-10, figure 18.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.D.] The zero-pitch line (ZPL) represents level flight. The ZPL is displayed as a white line with a 75% transparent center section that is the width of the HUD FD. The transparent center section of the ZPL moves laterally as necessary to remain aligned with the lateral position of the FPM. A white dot is displayed in the center of the zero-pitch line.
Flight Path Marker

Figure: G450 SVS caged flight path marker, from G450 Aircraft Operating Manual, §2B-06-10, figure 20.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.E.] When the FD CMD mode is set to HUD, a flight path marker (FPM) is displayed to depict aircraft flight path. When the FD CMD mode is set to HUD, and CAGED is selected on the DC ADI Menu (while SVS is selected), the FPM is caged horizontally and displayed with an opening at the bottom of the symbol.

Figure: G450 SVS uncaged flight path marker, from G450 Aircraft Operating Manual, §2B-06-10, figure 21.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.E.] When the FD CMD mode is set to HUD and UNCAGED is selected on the DC ADI menu (SVS selected) the FPM moves laterally and is displayed with bottom of the symbol closed.

Figure: G450 SVS magenta flight path marker, from G450 Aircraft Operating Manual, §2B-06-10, figure 22.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.E.]
When the FD CMD mode is SC, CP, or HUD and when CAGED is selected, a magenta FPM is displayed, as shown in [the figure].
When the magenta FPM approaches within one wing length of the caged FPM (on the PFD), the magenta FPM begins to fade so that it is completely invisible when superimposed directly under the caged FPM.
The uncaged FPM and magenta FPM have the ability to move vertically to the upper (bank indicator) and lower (heading readout) limits and laterally to the airspeed tape and altimeter tape limits.
The caged, uncaged, and magenta FPM flash when the FPM position exceeds the vertical or horizontal display limits on the SV PFD. The FPM becomes active when IRS ground speed is greater than or equal to 63 knots. The FPM remains active until the IRS ground speed is less than 60 knots.
Pitch Limit Indicator

Figure: G450 SVS pitch limit indicator, from G450 Aircraft Operating Manual, §2B-06-10, figure 23.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.F.]
When the flight director mode is single cue or cross-pointer, the pitch limit indicator is aligned laterally with the aircraft symbol.
When the flight director mode is HUD, the pitch limit indicator moves laterally as necessary to remain centered on the lateral position of the FPM.
The pitch limit indicator (PLI) moves vertically within the upper (bank indicator) and lower (heading readout) limits.
The PLI flashes on/off when near the vertical or horizontal edge limits.
When the flight director is set to single cue or cross-pointer, PLI movements are referenced to the aircraft symbol.
When the flight director is set to HUD, PLI movements are referenced to the flight path marker.
Radar Altitude Indicator

Figure: G450 SVS radar altitude indicator, from G450 Aircraft Operating Manual, §2B-06-10, figure 24.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.G.] When the FD CMD is set to HUD and the flight path marker is displayed, the radar altitude readout is located below and to the right of the right wing of the FPM.
Flight Director

Figure: G450 SVS flight director, from G450 Aircraft Operating Manual, §2B-06-10, figure 25.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.H.] When FD CMD is set to HUD, the FD symbol is magenta with slightly wider wings and a transparent center. The HUD FD uses path-based guidance from AFCS.
Speed Error Tape

Figure: G450 SVS speed error tape, from G450 Aircraft Operating Manual, §2B-06-10, figure 26.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.I.]
The speed error tape is displayed when the FD CMD mode is in HUD. It is a hollow white rectangle ascending or descending vertically from the left edge of the FPM wing.
The length of the speed error tape represents the difference between the selected airspeed and the current airspeed (same as HUD).
The speed error tape rises or descends to a maximum length of approximately 0.63 inches at an airspeed differential of 20 kt/.04M.
Downward movement of the speed error tape indicates current airspeed is less than the selected airspeed. Upward movement of the speed error tape indicates current airspeed is greater than the selected airspeed.
Acceleration Cue
Figure: G450 SVS speed error tape, from G450 Aircraft Operating Manual, §2B-06-10, figure 26.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.J.]
The acceleration cue is displayed as a small white chevron when SVS PFD is selected and when the FD CMD mode is HUD.
The acceleration cue is positioned just to the left wing of the FPM when acceleration is zero.
The acceleration cue moves vertically beside the FPM. The acceleration cue moves above the FPM for increasing acceleration and moves below the FPM for decreasing acceleration.
Runway/Airport Symbol

Photo: Runway symbol, from Eddie's aircraft.
[G450 Aircraft Operating Manual, §2B-26-20, ¶2.K.]
Runway symbols are displayed for all runways in the database within the field of view as gray rectangles outlined in white that begin to fade in at 3 NM from the view depth and are solid by 8 NM from the view depth.
FMS selected arrival runways are outlined in cyan. The airport symbol is displayed as a cyan box around the FMS selected arrival runway. The size of the airport symbol is exaggerated when it comes into view to aid in locating it. As the aircraft moves toward the airport, the size is decreased. When 3 NM from the airport, the symbol appears to frame the runway itself. The runway length is justified to the threshold end of the runway longitudinally and centered on it laterally.
NOTE: This results in an airport symbol width that does not change as the range from viewpoint changes, while the length of the symbol does change with range.
Runways begin to fade into view at 32 NM. They fade in until they are completely opaque at 8 NM from the view depth, or 24 NM. The airport symbol is layered on top of runway symbols.
A cyan, dotted, extended runway centerline fades in with the airport symbol, extending out 10 NM from the runway threshold.
NOTE: As with the airport symbol, the dotted centerline refers to the FMS-selected runway.
Runway Lead-In Line/Extended Centerline Distance Markers
[G450 Aircraft Operating Manual, §2B-26-100, ¶5.] Distance markers are displayed as small cyan chevrons (pointing towards the runway) placed at 1 NM intervals along the runway lead-in line. Distance markers are displayed as if they are lying flat on the terrain and are labeled 1 through 9 with a single digit that indicates the distance to the runway in nautical miles. Distance marker labels are displayed to the right of the distance markers. Distance marker labels are displayed upright with respect to the display regardless of distance marker orientation.
Obstacle Symbol
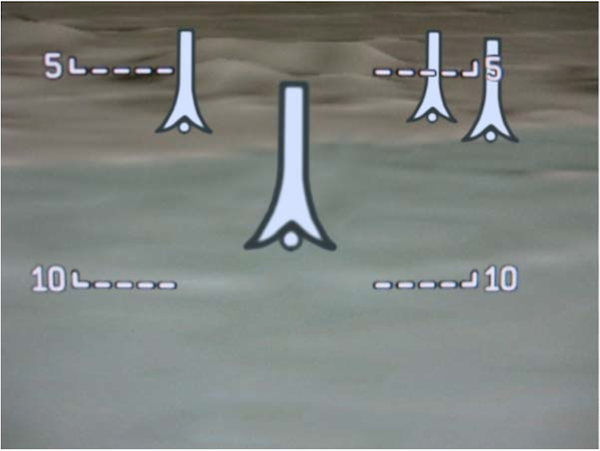
Figure: G450 SVS major obstacle, from G450 Aircraft Operating Manual, §2B-06-30, figure 29.
[G450 Aircraft Operating Manual, §2B-26-30] Obstacles greater than 1000 feet AGL are considered major obstacles. Major obstacles are displayed on the SV display and come into view at 3 NM from the view depth and fade out of view at 8 NM from the view depth, extending from the terrain level upwards to the actual height of the obstacle.
View Frustum
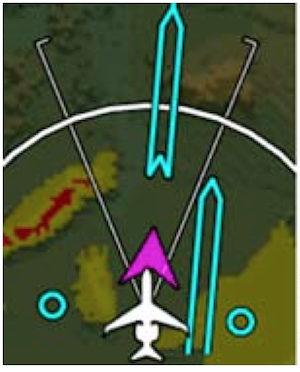
Figure: G450 SVS view frustum, from G450 Aircraft Operating Manual, §2B-06-00, page 32.
[G450 Aircraft Operating Manual, §2B-26-100, ¶4.D.]
When the HSI half-range selection is less than 150 NM, the area displayed on the SV PFD is depicted on the HSI as two lines representing the lateral limits of the rendered terrain. These lines are called frustum lines.
The near end of the frustum lines are positioned to represent the nearest terrain visible on the SV PFD at the selected HSI range as adjusted for aircraft altitude and pitch angle. The far end of the frustum lines are positioned to represent the SV PFD view depth at the selected HSI range. The view frustum rotates left or right as necessary to indicate the aircraft viewpoint heading over the HSI ground track.
The view frustum symbology is masked to the region inside the heading scale digits. The view frustum obscures the terrain beneath it and is removed from the display when a EGPWS or TCAS alert is active.
Terrain, Water, and Sky Depiction

Figure: G450 SVS terrain, from G450 Aircraft Operating Manual, §2B-06-50, figure 32.
[G450 Aircraft Operating Manual, §2B-26-50]
The field of view for the SVS terrain image is 44 degrees in azimuth and 33 degrees in elevation, yielding a 4/3 aspect ratio.
This image is a scaled, angular compression of the real view through the windshield of the terrain, runways, and obstacles.
AGL is defined as the height above the highest point of terrain within a radius of approximately 3 NM.
On the lateral map display, the crew can adjust the brightness of the rendered terrain using the cursor control device (CCD). SVS does not offer this option. The terrain is fixed at 25% of the maximum brightness the MAP can display. No terrain brightness adjustment is available.

Figure: G450 SVS water, from G450 Aircraft Operating Manual, §2B-06-50, figure 33.
The color of the water, like the terrain, has no brightness control and is set to 25% of the MAP maximum brightness. Texture is applied to the water and gives a wave effect by shading the flat water surface.
EGPWS Display (Enhanced SVS only)
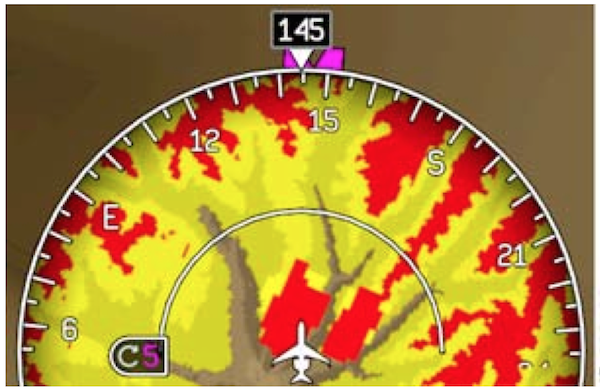
Figure: G450 Enhanced SVS EGPWS display, from G450 Aircraft Operating Manual, §2B-06-100, figure 47.
[G450 Aircraft Operating Manual, §2B-26-100, ¶4.B.] EGPWS terrain alerts are displayed as they are on the 2/3 HSI. HSI terrain colors and highlighting match those used on I-Nav during an EGPWS alert. As shown in Figure 47, when the EGPWS issues a terrain alert, the HSI half-range automatically changes to 5 NM for the duration of the terrain alert event. When an EGPWS terrain alert ends, the HSI range returns to the scale that was selected prior to the terrain event.
Position and Altitude For Synthetic Vision
[G450 Aircraft Operating Manual, §2B-26-60]
The SVS PFD uses the position from the on-side FMS. If FMS is in DEGRADE mode, DEAD RECKONING mode, or failed, then the terrain, runways, and obstacles are removed. Blue over brown SVS PFD is displayed and the TERR UNAVAIL annunciator is displayed.
Terrain is removed from the PFD and the TERR UNAVAIL annunciator is displayed when the aircraft latitude exceeds 82 degrees north or 82 degrees south and TERR is selected on the display controller.
When TERR is selected on the display controller and the aircraft latitude returns to a value less than or equal to 81.5 degrees north after exceeding 82 degrees north or less than or equal to 81.5 degrees south after exceeding 82 degrees south, synthetic vision terrain resumes on the PFD with the TERR UNAVAIL annunciator removed.
When the selected IRU is not in NAV mode, the terrain, runways, and obstacles are removed (blue over brown ADI is displayed) and the TERR UNAVAIL annunciator is displayed.
The altitude used for the SVS PFD is the geometric altitude from the on-side EGPWS.
Unusual Attitudes

Figure: G450 SVS intermediate attitude (low), from G450 Aircraft Operating Manual, §2B-06-70, figure 35
[G450 Aircraft Operating Manual, §2B-26-70] Since the PFD is not permitted to display an all sky or all terrain image, a small, fixed portion of the sky is always displayed at very low pitch angles.

Figure: G450 SVS intermediate attitude (high), from G450 Aircraft Operating Manual, §2B-06-70, figure 36.
Correspondingly, a fixed portion of the terrain is always displayed at very high pitch angles.
When the geometric altitude is less than 10,000 feet, the intermediate regime is displayed when the pitch attitude exceeds +20 or -7.5 degrees pitch and exited after 4 seconds when pitch attitude is reduced to less than +20 degrees or greater than -7.5 degrees.
When the geometric altitude is greater than or equal to 10,000 feet, the intermediate regime is invoked when above +17 degrees or below -7.5 degrees pitch and exited after 4 seconds when pitch is below +17 degrees and above -7.5 degrees.

Figure: G450 SVS unusual attitude, from G450 Aircraft Operating Manual, §2B-06-70, figure 37.
[G450 Aircraft Operating Manual, §2B-26-80]
The unusual attitude display starts immediately if the aircraft pitch attitude exceeds + or - 30 degrees or if the bank angle exceeds 65 degrees. The unusual attitude display remains until pitch attitude is reduced to less than 15 degrees and roll is reduced to less than 30 degrees for at least 2 seconds.
The pitch lines in the unusual attitude display are compressed similar to the HUD unusual attitude display.
Obstacles and runways are removed from display during an unusual attitude and the terrain image is changed to a blue over brown display.
During unusual attitudes, the following cues displayed for crew awareness:
The +90 degree pitch symbol is displayed directly above the double red chevrons.
The -90 degree pitch symbol is displayed directly below the double red chevrons.
All other symbols are removed during unusual attitude mode except: airspeed tape, including low speed awareness and maximum operating speed parameters, altitude tape, including low altitude awareness parameter, metric altitude (if selected), Mach readout, AOA readout, 180 degree HSI compass card, HSI aircraft symbol, and heading readout.
TCAS Annunciation

Figure: G450 SVS TCAS annunciation, from G450 Aircraft Operating Manual, §2B-06-90, figure 43.
[G450 Aircraft Operating Manual, §2B-26-90]
Unless Enhanced SVS is installed, the display of TCAS targets (traffic), HSI half-range arc and digits, top down terrain (EGPWS image), weather radar images, and all associated readouts are inhibited on the SV PFD. The HSI auto pop-up logic that exists with the 2/3 PFD and Enhanced SVS, with respect to terrain/traffic alerts, is inhibited when operating with Standard SVS.
For aircraft certification Foxtrot and earlier, when a TCAS RA is active and the FD CMD mode is HUD, the boresight symbol is changed to a solid single-cue aircraft symbol, and the flight director and flight path marker, if displayed, are removed.
For aircraft certification Golf, when a TCAS RA is active and the FD CMD mode is HUD, the boresight symbol remains the same (no longer changes to single-cue) and flight path-based guidance (same as VGS) is provided during an RA.
When a TCAS RA is active and the FD CMD mode is SC, the aircraft symbol changes to a solid single-cue aircraft symbol, and the flight director and flight path marker, if displayed, are removed.
When a TCAS RA is active, and the FD CMD mode is CP, the aircraft symbol is changed to a solid cross-pointer aircraft symbol, and the flight director and flight path marker, if displayed, are removed.
Red do-not-fly goal posts and a green fly-to rectangle are displayed as on the standard PlaneView PFD.
The aircraft symbol is red and solid when in the do-not-fly pitch area. When the aircraft symbol is in the green fly-to rectangle, the aircraft symbol is depicted in green and solid.
When the green fly-to rectangle is edge limited due to the expanded pitch scale of the SVS PFD ADI, then the green fly-to rectangle remains in view and flashes.
The portion of the red goal posts in view when the fly-to box is edge limited flashes with the box.
When the TCAS RA is no longer active, the FD CMD symbols return to the currently selected mode.
When a TCAS test is initiated with SVS selected, the TCAS symbols are displayed so that they are within their respective edge limits (they do not flash due to edge limit constraints).
Runway Detailing (Enhanced SVS only)

Figure: G450 SVS runway detailing, from G450 Aircraft Operating Manual, §2B-06-100, figure 44.
[G450 Aircraft Operating Manual, §2B-26-100, ¶1]
Runway surfaces that feature runway detailing are displayed with runway numbers, pavement textures, and a runway centerline display.
Runway surfaces that feature runway detailing are displayed with runway designations and a pavement texture that indicates motion when moving along the runway. The runway surface textures are displayed in a dark gray color. Runway designations that include a letter, display the letter below the number(s). Runway designations approximate the appearance of actual runway markings.
Runway surfaces are displayed with runway numbers and textures when the aircraft viewpoint is positioned within 500 ft vertically and 1 NM laterally to the runway.
NOTE: Runway numbers and textures are displayed only when the difference between the runway bearing and aircraft viewpoint bearing is 30 degrees or less.
Runway surfaces are displayed with centerline stripes when the aircraft viewpoint is positioned within 500 ft vertically and 1 NM laterally to the runway.
NOTE: Runway centerline stripes are displayed only when the difference between the runway bearing and aircraft viewpoint bearing is 30 degrees or less.
Range Rings (Enhanced SVS only)

Figure: G450 SVS range ring, from G450 Aircraft Operating Manual, §2B-06-100, figure 45.
[G450 Aircraft Operating Manual, §2B-26-100, ¶2]
The terrain image on the PFD is displayed with a set of rings labeled with their distance from the aircraft. Range rings are white in color and are displayed at 3, 5, 10, 20, and 30 NM from the aircraft position.
The range rings follow the contour of the terrain and are displayed as if they are 10 feet above the underlying terrain to ensure that they do not disappear below the terrain. Range rings are labeled with their distance from the aircraft along the left edge of the terrain depiction between the airspeed tape and the left edge of the display.
NOTE: The range ring labels move vertically as the terrain and aircraft roll angle necessitate, but do not move horizontally.
Grid Lines
[G450 Aircraft Operating Manual, §2B-26-100, ¶3.]
Lines depicting an approximate north/south and east/west grid are displayed in black over the terrain depiction on the PFD. The grid lines are spaced at 0.4 NM intervals along both axes and are displayed as if they are affixed to the terrain (they translate and rotate with the terrain). The grid lines follow the contour of the terrain over which they are rendered.
The grid lines are hidden when higher terrain is near the aircraft viewpoint as appropriate. As they extend away from the aircraft viewpoint, the grid lines fade from 60% transparency at the viewpoint to 100% transparency 14 NM from the viewpoint.
Synthetic Vision-Primary Flight Display Failure
[G450 Aircraft Operating Manual, §05-16-260]
Following procedure is applicable to airplanes having ASC 037 or ASC 037A (or later approved revision).
The Synthetic Vision-Primary Flight Display (SV-PFD) will automatically revert to the standard blue over brown display for any of the following conditions:
TERR selected OFF on the display controller
EGPWS 1 and 2 both failed
FMS Degrade or DR
North or South of 82 degrees (82°) latitude
Selected IRU not in navigation mode
Selected FMS failed
Geometric altitude not available to EGPWS
Intermediate attitude
Unusual attitude
Radio Altimeter 1 and 2 both failed when within 2500 feet of terrain
Loss of EGPWS terrain twice within 15 seconds. (The pilot has the option of reselecting 'TERR' to regain synthetic terrain)
If these conditions are not present and the SV-PFD fails to display synthetic terrain it is most likely due to degradation in the EGPWS vertical or horizontal accuracy. This could be caused by poor GPS satellite orientation or blocking by terrain. When the accuracy improves the synthetic terrain will automatically return.
If DU reversion occurs with the display controller displaying the SVS page, select the PFD to 2/3 to regain all the 2/3 options such as 120 and 360 HSI.
SV-PFD cannot be displayed if DU 2 and DU 3 are failed.
If pitch attitude exceeds ±30 degrees or roll angle exceeds 65 degrees the unusual attitude display will appear with a compressed pitch scale. Maneuver the airplane to return to a normal pitch and roll angle to recover from the unusual attitude.
TCAS
General Description:
[G450 AOM, ¶2A-34-60] The Honeywell Traffic and Collision Avoidance System (TCAS-2000) is production installed on the G450 airplane. TCAS provides the flight crew with notifications of the presence of other transponder equipped traffic in the vicinity that may present a collision hazard. TCAS can track up to fifty (50) airplanes simultaneously, however the display can accommodate only thirty-two (32) traffic symbols. The system provides aural alerts to the presence of traffic, visual plots of the relative location of other airplanes on cockpit displays, and aural and visual cues for evasive maneuvers if collision is imminent. If both converging airplanes are equipped with TCAS and Mode S transponders, the systems mutually coordinate evasive maneuvers to ensure diverging flight paths.
TCAS can exchange data with other airplanes having Mode S transponders at a range of forty nautical miles (40 NM) and can detect (but not communicate with) Mode S equipped targets up to one hundred twenty miles (120 NM). For targets with Mode A or Mode C transponders, the range is twenty nautical miles (20 NM).
Antennas:

Symbology:
TCAS symbology is the same on both the HSI, 1/6 window and MAP display. Traffic is represented in different icon shapes and colors corresponding to the potential threat of collision:

Control:

Relative Altitude Limits:

Do you have to have it?
MEL Says No...
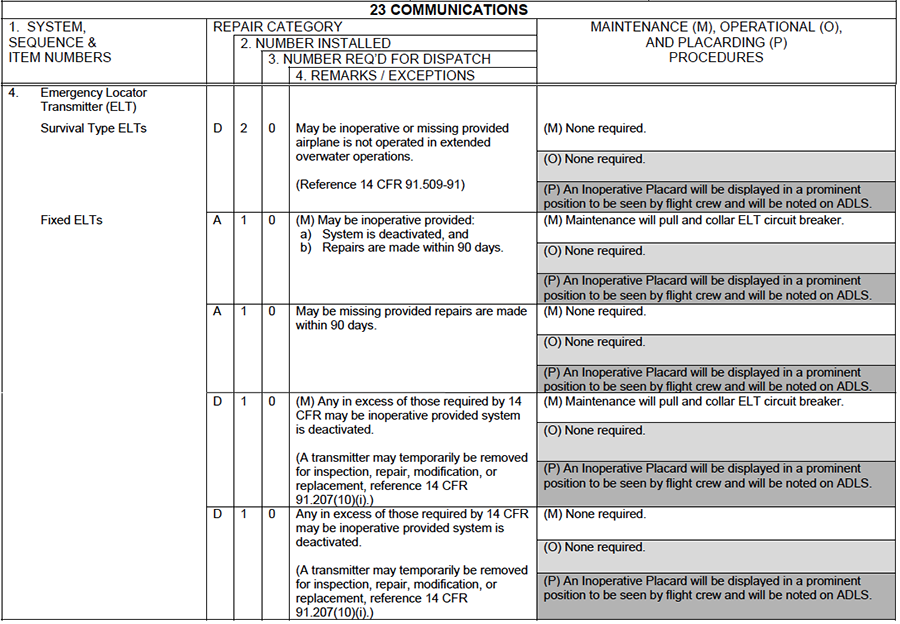
ICAO Says Yes. [ICAO Annex 6, §6.18.]
6.18.1 From 1 January 2003, all turbine-engined aeroplanes of a maximum certificated take-off mass in excess of 15 000 kg or authorized to carry more than 30 passengers shall be equipped with an airborne collision avoidance system (ACAS II).
6.18.2 From 1 January 2005, all turbine-engined aeroplanes of a maximum certificated take-off mass in excess of 5 700 kg or authorized to carry more than 19 passengers shall be equipped with an airborne collision avoidance system (ACAS II).
6.18.3 Recommendation.— All aeroplanes should be equipped with an airborne collision avoidance system (ACAS II). 6.18.4 An airborne collision avoidance system shall operate in accordance with the relevant provisions of Annex 10, Volume IV.
Two Screen Synoptics
On battery power only, the inboard DUs will be blank and the outboard DUs will show the PFD with engine and CAS 1/6 screens. You can still get synoptics by pressing the copilot's display controller MAP button, which turns DU 4 into what you are used to seeing on DU 3.
Yes, it isn't in the book, but it works: Video: G450 Two DU Synoptics Demo.
References:
Gulfstream Flight Management System Quick Task List (FMS QTL), Rev 1, Aug 20, 2012
Gulfstream G450 Airplane Flight Manual, Revision 35, April 18, 2013
Gulfstream G450 Maintenance Manual, Revision 18, Dec 12, 2013
Gulfstream G450 Operating Manual Supplement, G-450-OMS-02, Extended Operations (ETOPS) Guide, Revision 2, April 2, 2009
Gulfstream G450 Performance Handbook, GAC-AC-G450-OPS-0003, Revision 20, November 30, 2011
Gulfstream G450 Quick Reference Handbook, GAC-AC-G450-OPS-0003, Revision 34, 18 April 2013
Gulfstream G450 Weight and Balance Manual, Revision 3, March 2008
Gulfstream GV Aircraft Operating Manual, GAC-AC-GV-OPS-0002, Revision 30, May 13, 2008
Gulfstream Journal, Planeview EDS Intermittent Failure, November 14, 2014
Honeywell Direct-To, FMS Quarterly Update and Newsletter, December 2011
Honeywell Enhanced Ground Proximity Warning System (EGPWS) and Runway Awareness Advisory System (RAAS) Pilot Guide, 060-4241-0000, Rev. E - December 2003, MK V & MK VII EGPWS Pilot Guide