Vertical Navigation (VNAV)
James Albright (a former G450 driver)
Updated: 2017-06-18
The PlaneView VNAV is smarter than you are except when it is dumber than you are. What determines which mode — dumb or smart — is up to you. What is alarming, however, is this: when the VNAV is smarter than you are, your license is at risk.
Everything here is from the references shown below, with a few comments in an alternate color.
General VNAV Rules
[G450 Aircraft Operating Manual §2B-28-40 ¶4.]
The FMS must be the selected navigation source and LNAV must be engaged for VPATH to be operational.
VNAV does not function until all PERFORMANCE INIT information has been programmed into the MCDU. When any of the PERFORMANCE INIT data is incomplete and VNAV is armed, a PERF-VNAV UNAVAILABLE message is displayed in the scratch pad.
VNAV is available for all phases of flight.
Climbs are flown using VFLCH only.
Descents are flown using VFLCH or VPATH.
VNAV never passes through the altitude preselector.
The pilot should set the altitude preselector only to ATC cleared altitudes.
VNAV keeps the aircraft as high as possible for as long as possible.
VPATH angles are from 1° to 6°.
Path guidance is always followed during VPATH descents unless the FMS transitions to speed reversion. In this condition, the FMS transitions out of VPATH to VFLCH.
Speed protection and LATCHED SPEED are active in VFLCH.
When the altitude preselector is set above (climbs) or below (descents) current altitude and VNAV is engaged, the FMS commands the autopilot to begin a climb (VFLCH) or descent (VFLCH or VPATH).
VNAV is engaged by selecting the FMS as the navigation source and selecting the VNAV button on the guidance panel. EFIS annunciates the submode of VNAV.
VPATH default descent angle is part of performance initialization. However, after the angle is displayed for each waypoint, the crew can change it.
When the altimeter is adjusted to display height above the ground (QFE) rather than sea level, VNAV should not be used.
When the altitude preselector is properly set, VNAV observes flight plan constraint altitudes.
A vertical track alert is issued anytime the FMS commands a vertical track change. It is issued 60 seconds before a change from level flight to either a climb or descent. When the aircraft is completing a climb or descent, the vertical alert is issued 1000 ft before the level-off altitude. A vertical alert is not issued when the level-off altitude is set on the altitude preselector.
When VGP is active, the altitude preselector can be set to the missed approach altitude (similar to glide slope capture).
VNAV Climb

Figure: VNAV Climb Profile, from G450 Aircraft Operating Manual §2B-28-40 Figure 16.
[G450 Aircraft Operating Manual §2B-28-40 ¶9.A.]
A VNAV climb profile consists of the following:
VNAV is engaged in a VFLCH airspeed climb (1) after takeoff.
One thousand feet before reaching the constraint altitude, a VERT ALRT is given (2).
The flight guidance computer changes to VASEL to capture the altitude constraint (3).
The flight guidance computer switches to VALT at the constraint altitude (4).
One minute before the constrained lateral waypoint is reached, a VERT ALRT is given (5) indicating that an automatic climb begins at the waypoint.
The altitude preselector is set higher than the constraint altitude (5).
The flight guidance computers switches to VFLCH as the waypoint is passed (6).
The flight guidance computer performs a normal level off at the intermediate altitude preselector (7) switching from VFLCH to VASEL to VALT with the normal 1000 foot selector alert.
ATC clearance is received to the cruise altitude and the selector is dialed to the cleared altitude (8).
The FLCH button is pushed to resume the climb (8).
The flight guidance computer performs a normal level off at the cruise altitude (9) switching from VFLCH to VASEL to VALT with the normal 1000 foot selector alert and the speed command changes to the cruise value.
When you select VNAV in a climb, you are using a meat cleaver when what you might need is a scalpel. VNAV in a climb can make your life easier but sometimes the engines may be more power than VNAV can handle. Let's look at the Teterboro RUUDY FOUR departure as an example:

Figure: RUUDY Four RNAV Departure, Teterboro Jeppesen Terminal Chart, 10-3A, 1 Mar 13.
[G450 Aircraft Operating Manual §2B-28-40 ¶6.] All VNAV climbs are flown using VFLCH. Intermediate level offs are entered as waypoint constraints through the MCDU or they are set with the altitude preselector. VNAV never flies through the altitude preselector in any VNAV mode. When an intermediate level off is required due to an FMS waypoint altitude constraint, VNAV automatically resumes the climb after passing the waypoint when the selector is set above the current aircraft altitude. When the selector is not set above the current altitude, VNAV maintains the intermediate altitude when passing the waypoint. In this case, the climb is resumed by setting the altitude preselector higher and pushing VFLCH on the guidance panel.

Figure: From Eddie's notes.
[G450 Aircraft Operating Manual §2B-28-40 ¶5.] VNAV Flight Level Change (VFLCH) - In this mode, aircraft speed is controlled by the flight guidance computer (FGC) by the pitch of the aircraft. This mode is also referred to as speed on elevator. For most operations, the autothrottle is set to climb power rating for climbs and idle for descents. Exceptions are when climbing or descending only a short distance. In these cases, the throttle can be set to less than climb power or more than idle to avoid abrupt changes.

Figure: From Eddie's notes.
The AOM says VNAV will use climb power for climbs except when climbing "only a short distance." The problem is that right after takeoff the engines are at takeoff thrust and the VNAV will not pull the power levers aggressively enough in time for the pitch to react and you could overshoot the first altitude. (This is one of the most common causes of the many violations Teterboro issues every year.)

Figure: From Eddie's Notes.
[G450 Aircraft Operating Manual §2B-28-40 ¶3.] VNAV never passes through the altitude preselector.
I have found using FLCH works better after takeoff in this situation and using V/S-1000 fpm works better still. But you should plan on using the altitude preselector for each intermediate level off. I know using VNAV in the climb with the preselector at the final altitude should, by the book, work. But for these departures requiring immediate level offs quite often it doesn't. After hundreds of times flying this departure I have come to the conclusion VNAV should not be used for climbs immediately after takeoff.
VNAV En Route Descent - No Vertical Constraint Given
[G450 Aircraft Operating Manual, §2B-28-40 ¶6.] Descents are flown as speed descents (VFLCH) or path descents (VPATH). The transition to descent is automatic, assuming the altitude preselector is set lower than the present altitude. One minute before TOD, the vertical track alert is given. Upon reaching the TOD, VNAV initiates either a VFLCH or VPATH descent. A speed descent (VFLCH) is flown when no altitude constraints exist in the flight plan during the descent. The TOD is calculated to place the aircraft at 1500 ft above the destination 10 miles prior to the destination. Also, the TOD is based on any speed constraints in the descent such as slowing to 250 kts below 10,000 ft. The pilot can initiate a VFLCH descent anytime by setting the altitude preselector to a lower altitude and pushing FLCH on the Guidance Panel. Following an intermediate level off at the altitude preselector value, the descent is resumed by dialing down the altitude preselector and pushing the FLCH button again on the Guidance Panel.

VNAV Flight Level Change Descent, from G450 Aircraft Operating Manual, §2B-28-40 Figure 17.
[G450 Aircraft Operating Manual, §2B-28-40 ¶9.B.]
From cruise altitude (1), dial down the altitude preselector to the ATC cleared altitude (2).
Push FLCH if already engaged in a VNAV mode or VNAV if not already in VNAV. The flight guidance computer switches to VFLCH and begins a descent (1).
One thousand feet before the altitude preselector (2) is reached, the normal altitude alert is given and the flight guidance computer does a normal level off switching from VFLCH to VASEL (3) to VALT (4).
An ATC clearance (5) is received to a lower altitude and the altitude preselector is lowered (6). FLCH is pushed (5) and the aircraft begins a descent.
One thousand feet before the altitude preselector (6), the normal altitude alert is given and the flight guidance computer does a normal level off switching from VFLCH to VASEL to VALT (7).
FLCH mode during descent brings the power levers to idle and controls airspeed by moving the elevator. It gives you a rough ride and in the G450 does a lousy job of holding speed. You will probably never see the so-called "speed descent" because you will almost always have a vertical constraint at the bottom of descent. But if you don't, say you are given clearance to land from a great distance out, you can select VNAV and it will remember to descend for you.
VNAV En Route Descent - Vertical Constraint Given
[G450 Aircraft Operating Manual, §2B-28-40 ¶6.] A path descent (VPATH) is flown when there is an altitude constraint in the descent portion of the active flight plan. The path angle associated with the constraint is either a default angle computed by the FMS, procedure specified, or pilot-entered. During path descents, AT OR ABOVE or AT OR BELOW constraints are not treated as AT constraints. VNAV looks further in the flight plan to determine if other constraints exist. If so,VNAV flies a single path that meets all constraints rather than multiple paths that treats each constraint as an AT constraint. After passing the last waypoint with an altitude constraint, VNAV changes from path descent (VPATH) to a speed descent (VFLCH).
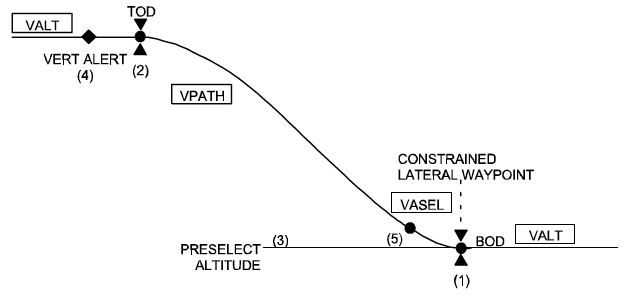
Figure: VNAV Path Descent Profile, from G450 Aircraft Operating Manual, §2B-28-40 Figure 18.
[G450 Aircraft Operating Manual, §2B-28-40 ¶9.C.]
A VNAV path descent can be engaged from VALT at any time if the altitude preselector has been dialed down before the TOD point is reached. The VNAV path descent mode is used to descend to a new flight level at a calculated or prescribed angle (between 1° and 6°). The following steps apply:
An altitude constraint is entered at a waypoint (1). The FMS calculates an angle and TOD (2) for the path descent.
At the TOD, the flight guidance computer switches from VALT to VPATH and begins a descent (2).
The altitude preselector is set to the ATC cleared altitude (3).
One minute before reaching the TOD, a VERT ALERT is given (4) and the vertical deviation scale is displayed on the EFIS. When the altitude preselector is not at a lower altitude, the message RESET ALT SEL? is displayed.
The flight guidance computer does a normal level off switching from VPATH to VASEL (5) to VALT (1).
The VNAV angle is always displayed on MCDU for path descents. The path is always followed except when the aircraft speed approaches the following:
Vmo/Mmo
Landing gear or flap placard speed
VREF.
VNAV tries to satisfy both the altitude preselector and the waypoint constraint altitude. However, VNAV never flies through the altitude preselector.
Selecting VNAV prior to Top of Descent with a target altitude in the altitude preselector and entered in the FMS will allow the FMS to reduce power and pitch to initiate a descent at TOD and control both power and pitch to maintain a predetermined descent angle all the way to the new altitude. At that point the aircraft will level off and resume cruise. This always works, except when it doesn't:
If the computed angle is outside 1° and 6° the VNAV should tell you in the scratch pad but it might just give its best effort and not let you know it will not make the required altitude at the required point in space.
The VNAV might be waiting for a VERT ALERT that never came because it was inside the one minute warning once it figured out where the VERT ALERT should occur. You may or may not get a warning.
An input error may result in completely a valid VNAV computation that is not what you had intended and will allow you to exceed an ATC clearance.
You can save yourself a lot of trouble if you simply make a quick descent calculation after you've told the VNAV what to do. If your FMS has the default 3° VNAV angle entered, all default descents should occur 3 miles per 1,000' prior to the constraint. (Why? Refer to 60 to 1.) A few examples in the following scenarios.
VNAV Early Descent to Capture Path (VPATH)

Figure: VNAV Early Descent to Capture Path, from G450 Aircraft Operating Manual, §2B-28-40 Figure 20.
[G450 Aircraft Operating Manual, §2B-28-40 ¶9.E.]
This scenario is typical, should ATC instruct a descent before the established TOD point is reached. The steps are as follows:
An altitude constraint is entered at away point (1). The FMS calculates an angle and TOD (2) for the path descent.
The altitude preselector is set to the ATC cleared altitude (3).
Push the FLCH button (4) to begin the descent. The flight guidance computer switches to VFLCH to begin the descent.
As the path is approached, the vertical deviation is displayed on the EFIS. When the path is intercepted, the flight guidance computer switches to VPATH (5).
The flight guidance computer does a normal level off, switching from VPATH to VASEL to VALT (1).
This scenario is what you hope to see, in fact you expect it. But if the descent is entered just as the default 3° top of descent is reached, or if you've made a entry error, or if something else is out of place, the descent can be missed or miscalculated. You can ensure you catch these errors by some very simple math:
Determine the thousands of feet to be lost
Multiple that by three
The result is your normal top of descent point.
If, for example, you are at FL450 and told to cross the JHW VOR at FL200, your TOD should be at (45 - 20) x 3 = 75nm. If the VNAV hasn't started down by 75nm, you need to override it.
VNAV Direct-To Path (VPATH)

Figure: VNAV Early Path Descent Using Vertical DIRECT-TO, from G450 Aircraft Operating Manual, §2B-28-40 Figure 21.
[G450 Aircraft Operating Manual, §2B-28-40 ¶9.F.]
An altitude constraint is entered at a waypoint (1). The FMS calculates an angle and TOD (2) for the path descent.
The altitude preselector is set (3) to the ATC cleared altitude (4).
A vertical direct-to is performed (5) to the constrained waypoint (1). The FMS calculates the new angle and the flight guidance computer transitions to VPATH.
The flight guidance computer does a normal level off, switching from VPATH to VASEL (6) to VALT (1).
If you want to start down early, or if you are beyond the default 3° top of descent and need to start down late, you can press the DIR key on the MCDU and then the RSK key abeam the altitude constraint to force the VNAV to figure its descent from that point and to use the result as the target descent angle. This should work as long as the computed angle is between 1° and 6°. You can check the system's math by dividing the altitude to lose (in hundreds of feet) by the distance to lose (in nautical miles).
VNAV Late Descent Direct-To (VPATH)

Figure: VNAV Late Path Descent Using Vertical DIRECT-TO, from G450 Aircraft Operating Manual, §2B-28-40 Figure 22.
[G450 Aircraft Operating Manual, §2B-28-40 ¶9.G.]
In this scenario, descent clearance is not received before the TOD is reached. The following applies:
An altitude constraint is entered at a waypoint (1). The FMS calculates an angle and TOD (2) for the path descent.
One minute before reaching the TOD, a vertical track alert (VTA) is given (3) and the vertical deviation scale is displayed on the EFIS. When the altitude preselector is not at a lower altitude, the message RESET ALT SEL? is displayed.
At the TOD (2), the flight guidance computer remains in VALT and remains level through the TOD.
The altitude preselector is set (4) to the ATC cleared altitude (5).
A vertical DIRECT-TO is performed (6) to the constrained waypoint (1). The FMS calculates the angle and the flight guidance computer transitions to VPATH.
The flight guidance computer does a normal level off, switching from VPATH to VASEL to VALT (1).
If the VNAV computes an angle in excess of the programmed value, defaulted to 3°, your only warning may be the "V" on the PFD sliding above you while the aircraft maintains altitude. Using a Direct-To command should make things right unless the angle is increasing quickly or the angle already exceeds 6°. You should point the nose down using FLCH, VS, or TCS. If the angle is still within limits, you should be able to re-accomplish the Direct-To.
VNAV STAR

Figure: RIIVR TWO ARRIVAL, Los Angeles Jeppesen Terminal Chart, 10-2J, 2 APR 10
The VNAV works well for most Standard Arrival Routes but you need to understand what the VNAV wants to do, as opposed to what you want to do. The RIIVR TWO is an example of where you can allow the VNAV to control the flight path so long as you are able to configure the aircraft at the right time.

Figure: From Eddie's notes.
The VNAV examines the procedure one step at a time and comes to the following conclusions:
It can make the entire descent at 3° or less by targeting 14,000' at RIIVR.
Therefore it begins an en route descent using a 3° descent from altitude that crosses GRAMM at 19,400', well inside the 17,000' - FL 210 criteria.
From RIIVR at 14,000' it can fly a 2.85° glide path all the way to the runway, so it plans on doing just that.
If you allow the VNAV to control the descent from altitude at 0.80 Mach, it should be able to control the airspeed to decelerate to 250 KCAS by 10,000'. Sometimes it does, sometimes it doesn't. From 10,000' flying a 2.85° glide path you should be able to get the airspeed low enough to extend flaps and landing gear, fully configured in time for landing. But you cannot wait for the autospeed to move from 250 KCAS to 200 KCAS on its own, it will be too late.
Understanding that a 3° glide path requires about 4,000' to decelerate from 300 KCAS to 250 KCAS at 10,000' allows you to monitor the VNAV's performance and to manually select 250 KCAS if it hasn't done so it time. The target speed should change from 250 KCAS to 200 KCAS about 20 nm out, and that works well. (If it hasn't, you should select it manually.) But you will need 10° flaps for the deceleration, the airplane won't get there clean. If your goal is to be stabilized on approach by 1,000' AGL — and it really should be — you need to be fully configured not later than 1,200' AGL. That's 4 nm from touchdown. To make that happen, you should have:
10° Flaps no later than 9 nm
20° Flaps no later than 6 nm
Landing gear no later than 5 nm
39° Flaps no later than 4 nm
Armed with this knowledge, you can use the VNAV profile descent without having to resort to using the speed brakes to configure or having to fly an unstable approach.
VNAV Approach
The rules for VNAV down to minimums have changed over the years and we are not all created equal:
You can use VNAV down to a DA if you are equipped and qualified to fly an LPV Approach.
More about this: LPV Approach.
More about this: G450 LPV Approach.
You can fly to LNAV/VNAV minimums using an RNAV (GPS) approach as outlined in AC 90-105.
More about this: RNAV (GPS) Approaches.
You can fly approaches with the ball note "Only authorized operators may use VNAV DA(H) in lieu of MDA(H)" down to the published MDA if you have operations specifications (or LOAs) allowing it.
More about this: VNAV.
Approach
[G450 Aircraft Operating Manual §2B-27-90, ¶1. (Pg 46.)] Approach.
If VNAV(VPATH) is used for vertical guidance on the approach, verify that the approach plate waypoint altitudes are shown on the FMS MCDU. Verify that the altitude selector is set to the minimum descent altitude (MDA).
The navigation database does not have step down waypoints between the final approach fix (FAF) and MAP if the VNAV path satisfies the step down restrictions. VNAV path guidance and a crosscheck with other navigation aids are the only assurance that all descent path restrictions are met. Using modes other than VNAV is desirable for some approaches.
An approach is selected with or without an approach transition. For example, if receiving vectors to the final approach course, an approach transition need not be selected with the approach. The pilot flies the specified vectors and arms LNAV, or LNAV and VNAV. The FMS automatically captures the final approach course.
The altitude selector is observed while in VNAV during all phases of flight, including the approach phase. The altitude selector should not be set below the published MDA until the runway is visible and the approach is made.
There are no VNAV descent angles coded in the database for circling approaches. VGP mode requires a database defined descent angle at the missed approach point in order for arming criteria to be met. Thus, VGP mode will not be available for descent during circling approaches. The CAS message FMS VGP Mode Unavailable is displayed if arming of VGP mode is attempted when conditions for VGP arm are not met.
Vectors to Final
[G450 Aircraft Operating Manual §2B-27-90 ¶3. (Pg 51.)] Vectors to Final. LNAV/VNAV Engagement. For guidance in the terminal/approach area, the FMS is used to fly LNAV/VNAV coupled up until sequencing onto a vectored approach transition intercept leg or until activation of a vectored approach transition. At that point, LNAV disengages (if engaged). VNAV remains engaged (if engaged, except in VPATH). From that point on, the pilot must fly vectors (as directed by ATC) to re-establish an intercept to the FAF and arm LNAV before LNAV is allowed to capture.
VNAV TOD Computation
[G450 Aircraft Operating Manual §2B-27-90 ¶3. (Pg 51.)] VNAV TOD Computation. If the aircraft is in level flight and the FAF is the active (TO) waypoint and Vectors to Final is active, a TOD is computed along the heading-select-intercept leg.
VGP
Vertical Glide Path (VGP) - Permits crew management of the altitude preselector while guiding the aircraft on a vertical path to the MAP. During a VGP descent, the altitude preselector is ignored, permitting the crew to select the missed approach altitude by selecting the APR button located on the guidance panel. VGP mode becomes active if the aircraft is within 50 NM direct distance of the destination, a non-localizer based approach has been selected in the FMS flight plan, and the FMS is the selected navigation source. LNAV automatically becomes the armed lateral FD mode if not previously armed or engaged. When VGP mode is capable, the ARM APR annunciator is displayed on the PFD above the vertical deviation scale. This annunciator is removed if the operator selects the VGP mode, as shown:

After LNAV becomes the active lateral FD mode, VGP becomes the active vertical FD mode if the descent path is to the MAP and the FMS can perform a path capture to the MAP. If VPATH was previously engaged, pushing the APR button on the GP automatically engages the VGP vertical FD mode and cancels VPATH. VGP mode is cancelled by pushing the APR button on the GP, deselecting the mode (the APR button is no longer lit), resulting in a vertical FD mode of PIT. Selection of another vertical FD mode such as FLCH, VS, ALT, GA, or VNAV cancels VGP mode and results in the transition to the new vertical mode. A VGP vertical deviation is displayed as a hollow P (Path) on the PFD when armed, as shown:

The Vertical Glide Path (VGP) mode also allows crew management of the altitude preselector during FMS non-precision approaches to be similar in operation to that of precision approaches. During FMS non-precision approaches in VPATH, it is necessary to dial the altitude preselector down, usually to the MDA or runway elevation. When a missed approach is executed, it is necessary to reset the altitude preselector for the missed approach. With the VGP mode, the altitude preselector can be set to the missed approach altitude during execution of the approach. The FMS guides the aircraft on a vertical path to the MAP regardless of the setting of the altitude preselector. This is similar in concept to glide slope capture for an ILS approach.
References:
Advisory Circular 90-105A, Approval Guidance for RNP Operations and Barometric Vertical Navigation in the U.S. National Airspace System and in Oceanic and Remote Continental Airspace, 3/7/2016, U.S. Department of Transportation
Gulfstream G450 Aircraft Operating Manual, Revision 35, April 30, 2013.
Gulfstream G450 Airplane Flight Manual, Revision 35, April 18, 2013